2段増幅型 CMOS オペアンプの設計
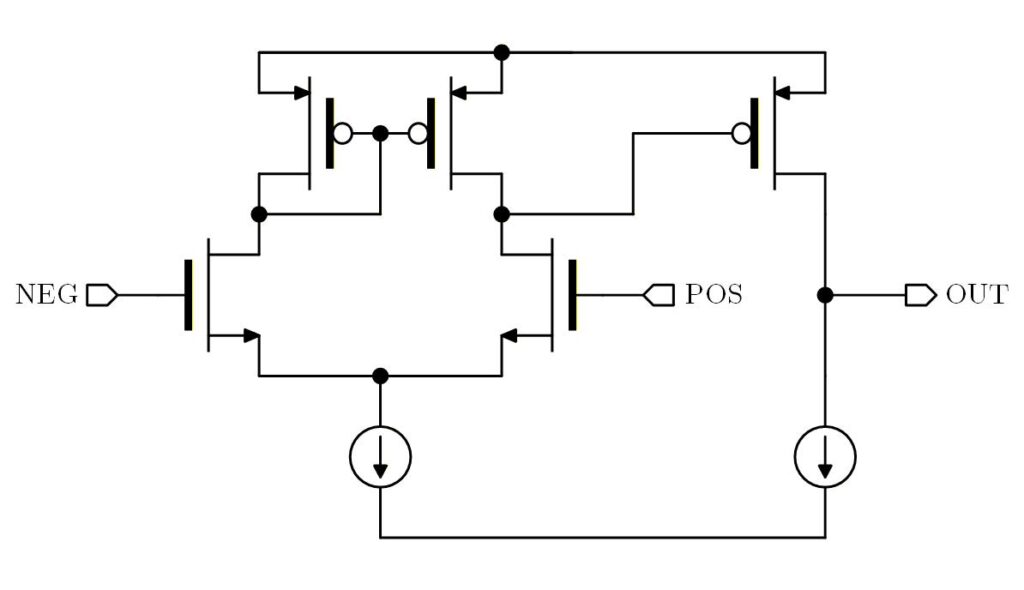
オペアンプの代表的な回路トポロジとして、Fig. 1-1 のような 2段増幅型の回路があります。
この節ではこのトポロジーの回路について、
Fig. 1-1
ひとこと
Fig. 1-1 で電流源の記号で書いている部分は実際にはトランジスタで構成します。 トランジスタの記号で書いてしまうと機能として電流源として働くことが明示的に示せなくなるため、あえて電流源の記号で表しています。
目次に戻る
DC 動作点解析
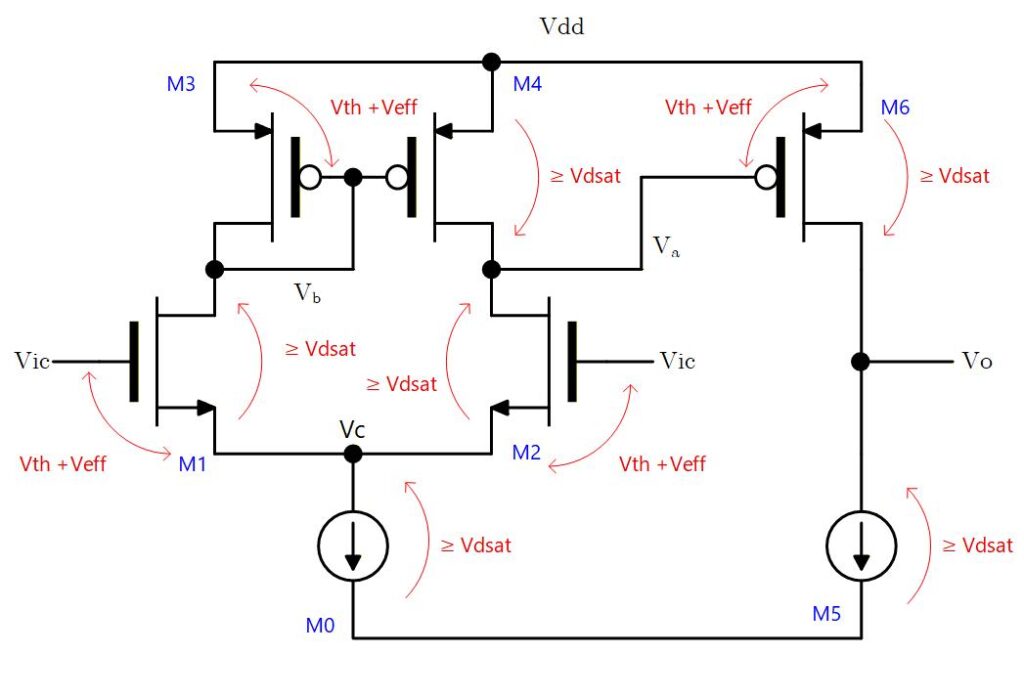
Fig. 1-1 の回路図に、動作点解析を行う上でのパラメータを追記したものを Fig. 1-2 に示します。
計算を簡略化するために、すべてのトランジスタについて、V t h V_{th} V e f f V_{eff} V d s a t V_{dsat}
また、後述しますが、オペアンプが通常動作するときは P O S POS N E G NEG V i c V_{ic}
Fig. 1-2
まず、V c V_c
M0 を電流源として使用するためには 5極管条件を満足する必要があるのでV c > V d s a t V_c\gt V_{dsat}
M1 (M2) の V g s V_{gs} V i c − V c = V t h + V e f f V_{ic}-V_c=V_{th}+V_{eff} V c = V i c − V t h − V e f f V_c=V_{ic}-V_{th}-V_{eff}
①,②からV i c − V t h − V e f f > V d s a t V_{ic}-V_{th}-V_{eff}\gt V_{dsat}
この式を変形してV i c > V t h + V e f f + V d s a t V_{ic}\gt V_{th}+V_{eff}+V_{dsat}
以上から差動対の入力電圧 V i c V_{ic} 下限値 がわかります。
次に V b V_b
M3 の Vgs の関係からV b = V d d − V t h − V e f f V_b=V_{dd}-V_{th}-V_{eff}
差動対のゲインを稼ぐためには M1を5極管条件で使う必要があるのでV b > V c + V d s a t V_b\gt V_{c}+V_{dsat}
④に②を代入してV b > V i c − V t h − V e f f + V d s a t V_b\gt V_{ic}-V_{th}-V_{eff}+V_{dsat}
⑤に③を代入してV d d − V t h − V e f f > V i c − V t h − V e f f + V d s a t V_{dd}-V_{th}-V_{eff}\gt V_{ic}-V_{th}-V_{eff}+V_{dsat}
この式を変形してV i c < V d d − V d s a t V_{ic}\lt V_{dd}-V_{dsat}
以上から差動対の入力電圧 V i c V_{ic} 上限値 がわかります。
続いて、V a V_a
M2 の V g s V_{gs} V c = V i c − V t h − V e f f V_c=V_{ic}-V_{th}-V_{eff}
M2 の 5極管条件からV a > V c + V d s a t V_a\gt V_c+V_{dsat}
⑦を⑧に代入するとV a > V i c − V t h − V e f f + V d s a t V_a\gt V_{ic}-V_{th}-V_{eff}+V_{dsat}
M6 の V g s V_{gs} V a = V d d − V t h − V e f f V_a=V_{dd}-V_{th}-V_{eff}
⑩を⑨に代入するとV d d − V t h − V e f f > V i c − V t h − V e f f + V d s a t V_{dd}-V_{th}-V_{eff}\gt V_{ic}-V_{th}-V_{eff}+V_{dsat}
この式を整理するとV d d > V i c + V d s a t V_{dd}\gt V_{ic}+V_{dsat} V i c < V d d − V d s a t V_{ic}\lt V_{dd}-V_{dsat}
となり、⑥と同じ結果が得られます。
またM4 の5極管条件からV a < V d d − V e f f V_a\lt V_{dd}-V_{eff}
で、⑩式から V a = V d d − V t h − V e f f V_a=V_{dd}-V_{th}-V_{eff} V t h > 0 V_{th}\gt 0
最後に、V o V_o
M5 の 5極管条件からV o > V d s a t V_o\gt V_{dsat}
M6 の 5極管条件からV o < V d d − V d s a t V_o\lt V_{dd}-V_{dsat}
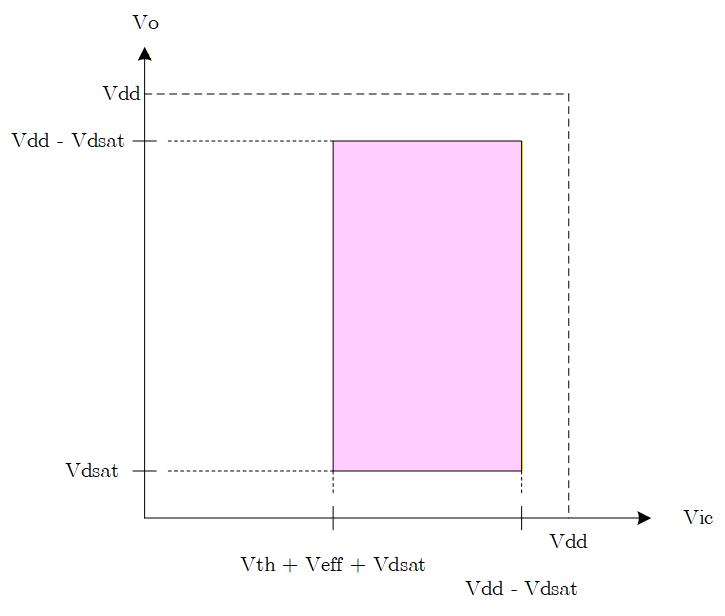
以上から、このオペアンプの入出力電圧のダイアグラムは Fig. 1-3 のように書けます。
具体的な数値として例えば、V d d = 1.8 V , V t h = 0.6 V , V e f f = V d s a t = 0.2 V V_{dd}=1.8V, V_{th}=0.6V, V_{eff}=V_{dsat}=0.2V 1.0 < V i c < V d d − 0.2 1.0\lt V_{ic}\lt V_{dd}-0.2 1.0 < V i c < 1.6 1.0\lt V_{ic}\lt 1.6
0.2 < V o < V d d − 0.2 0.2\lt V_o\lt V_{dd}-0.2 0.2 < V o < 1.6 0.2\lt V_o\lt 1.6
となります。
Fig. 1-3
目次に戻る
AC 小信号解析
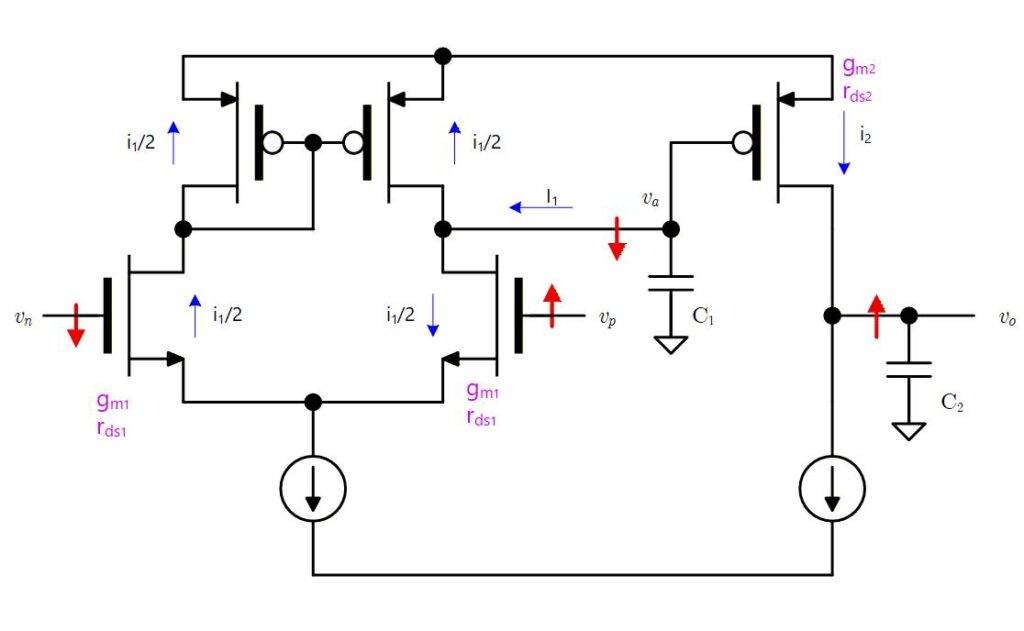
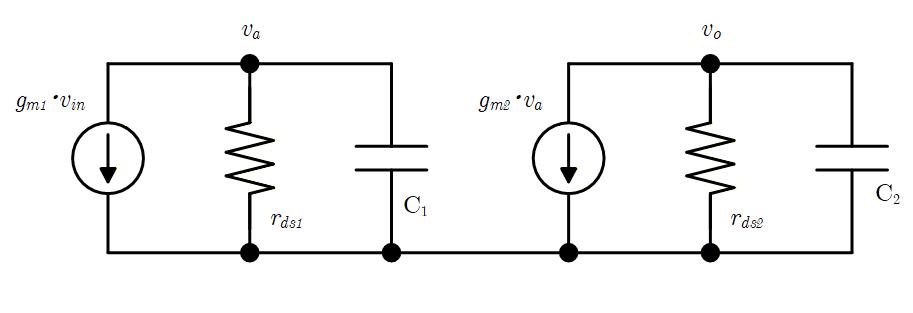
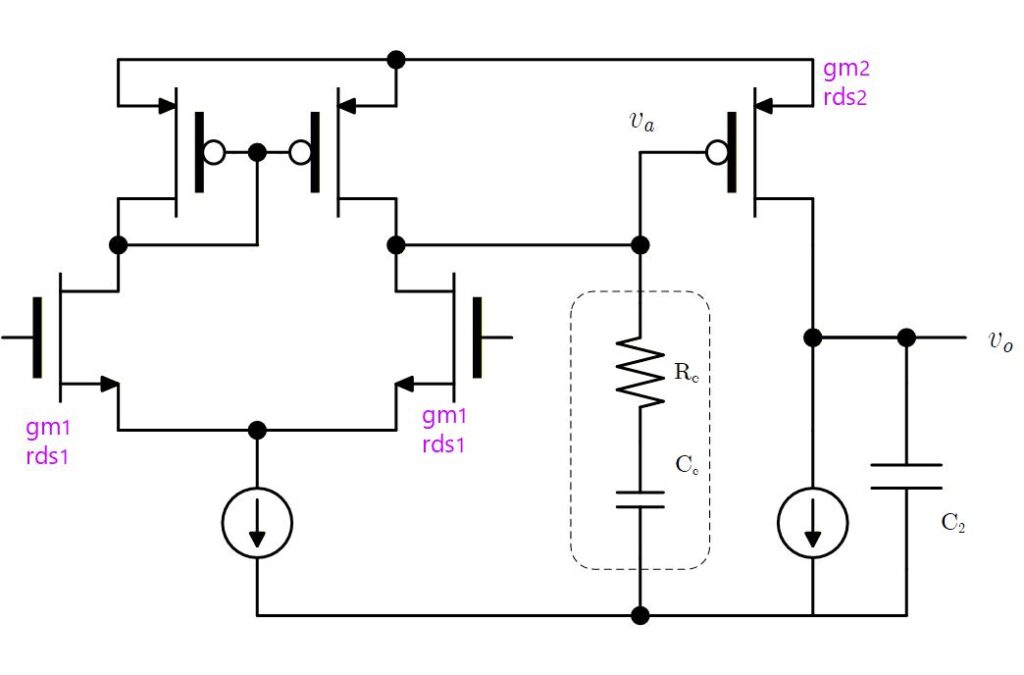
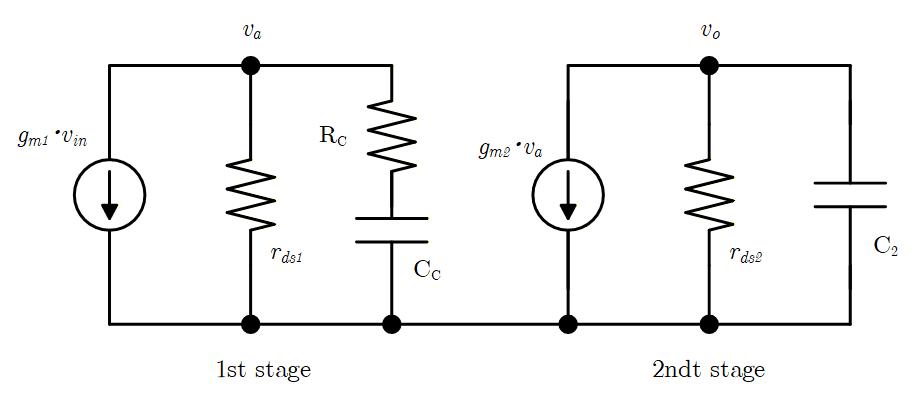
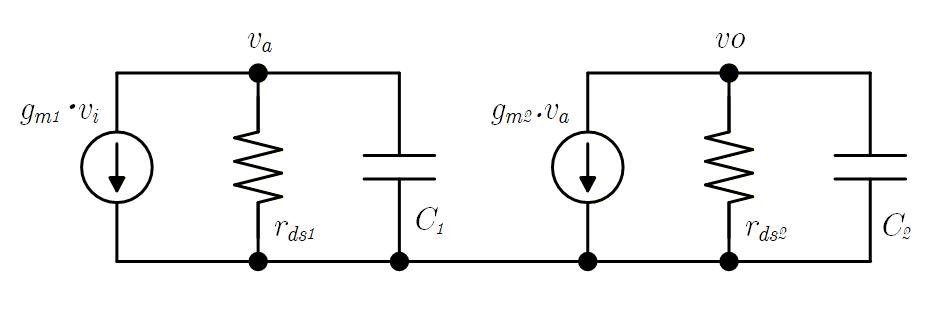
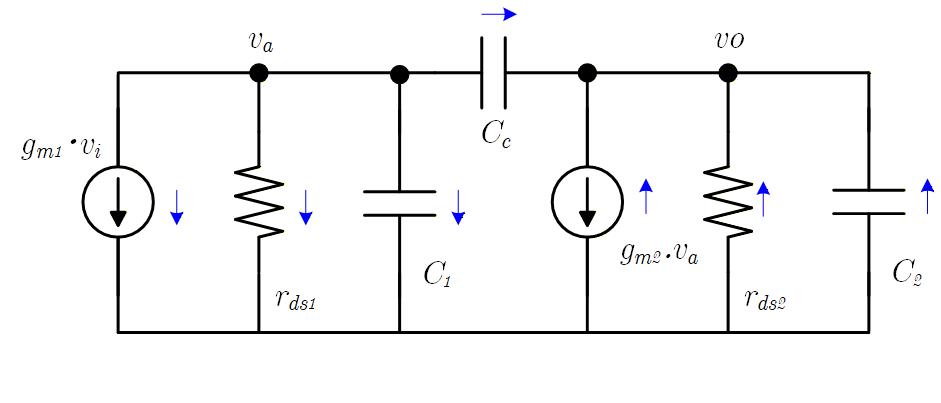
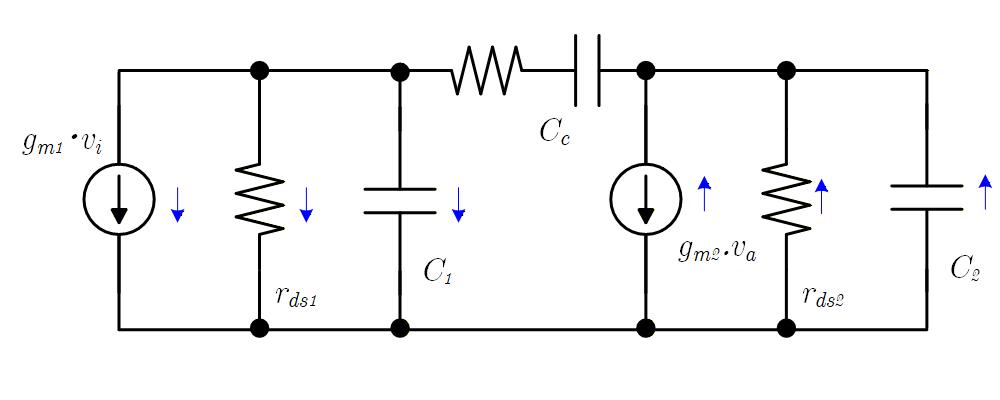
Fig. 1-1 の回路図に、小信号解析を行う上でパラメータ追記したものを Fig. 1-4a 、その小信号等価回路を Fig. 1-4b に示します。
計算を簡略化するために、計算に寄与しない、あるいは寄与が小さいパラメータは省略しています。
また、v a v_a C 1 C_1 v o v_o C 2 C_2
Fig. 1-4a
Fig. 1-4b
1st Stage の出力は、v a = g m 1 ⋅ v i ⋅ r d s 1 ⋅ 1 s ⋅ C 1 r d s 1 + 1 s ⋅ C 1 \displaystyle v_a=g_{m1}\cdot v_i \cdot \frac{r_{ds1}\cdot \frac{1}{s\cdot C_1}}{r_{ds1}+\frac{1}{s\cdot C_1}} v a v i = g m 1 ⋅ r d s 1 1 + s ⋅ C 1 ⋅ r d s 1 \displaystyle \frac{v_a}{v_i}=\frac{g_{m1}\cdot r_{ds1}}{1+s\cdot C_1\cdot r_{ds1}}
ここで、A 1 = g m 1 ⋅ r d s 1 A_1=g_{m1}\cdot r_{ds1} ω p 1 = 1 C 1 ⋅ r d s 1 \omega_{p1}=\frac{1}{C_1\cdot r_{ds1}} v a v i = A 1 1 + s / ω p 1 \frac{v_a}{v_i}=\frac{A_1}{1+s/\omega_{p1}}
2nd Stage についても同様に計算してA 2 = g m 2 ⋅ r d s 2 A_2=g_{m2}\cdot r_{ds2} ω p 2 = 1 C 2 ⋅ r d s 2 \omega_{p2}=\frac{1}{C_2\cdot r_{ds2}} v o v a = A 2 1 + s / ω p 2 \displaystyle \frac{v_o}{v_a}=\frac{A_2}{1+s/\omega_{p2}}
したがってトータルでの入出力伝達関数はv o v i = A 1 1 + s / ω p 1 ⋅ A 2 1 + s / ω p 2 \displaystyle \frac{v_o}{v_i}=\frac{A_1}{1+s/\omega_{p1}}\cdot \frac{A_2}{1+s/\omega_{p2}}
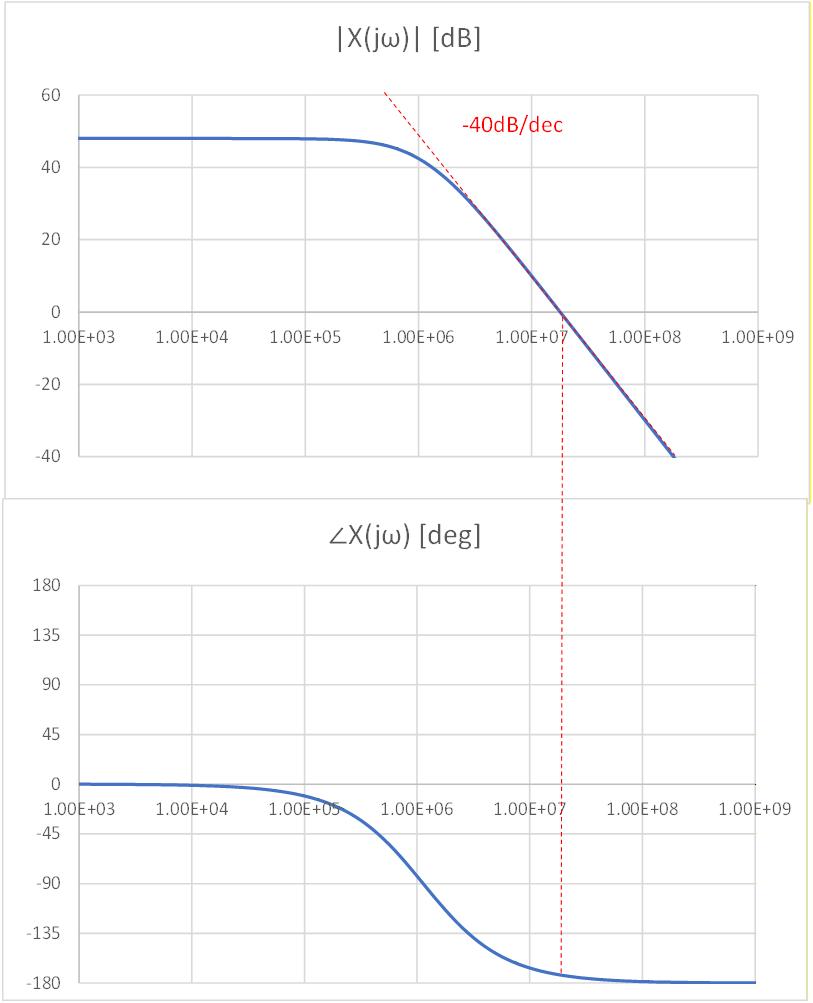
ここで、具体的な数値を代入して AC特性を求めてみます。
いま例えば g m 1 = 100 μ M h o g_{m1}=100\mu Mho r d s 1 = 500 k Ω r_{ds1}=500k\Omega C 1 = 0.1 p F C_1=0.1pF g m 2 = 500 μ M h o g_{m2}=500\mu Mho r d s 1 = 100 k Ω r_{ds1}=100k\Omega C 2 = 2 p F C_2=2pF A 1 = 50 A_1=50 A 2 = 50 A_2=50 A = A 1 ⋅ A 2 = 250 ( 48 d B ) A=A_1\cdot A_2=250 (48dB) ω 1 = 5 M r a d / s e c \omega_1=5M rad/sec f 1 = 800 k H z f_1=800kHz ω 2 = 10 M r a d / s e c \omega_2=10M rad/sec f 2 = 1.6 M H z f_2=1.6MHz
この条件でボード線図をプロットすると Fig. 1-5 のようになります。
Fig. 1-5
目次に戻る
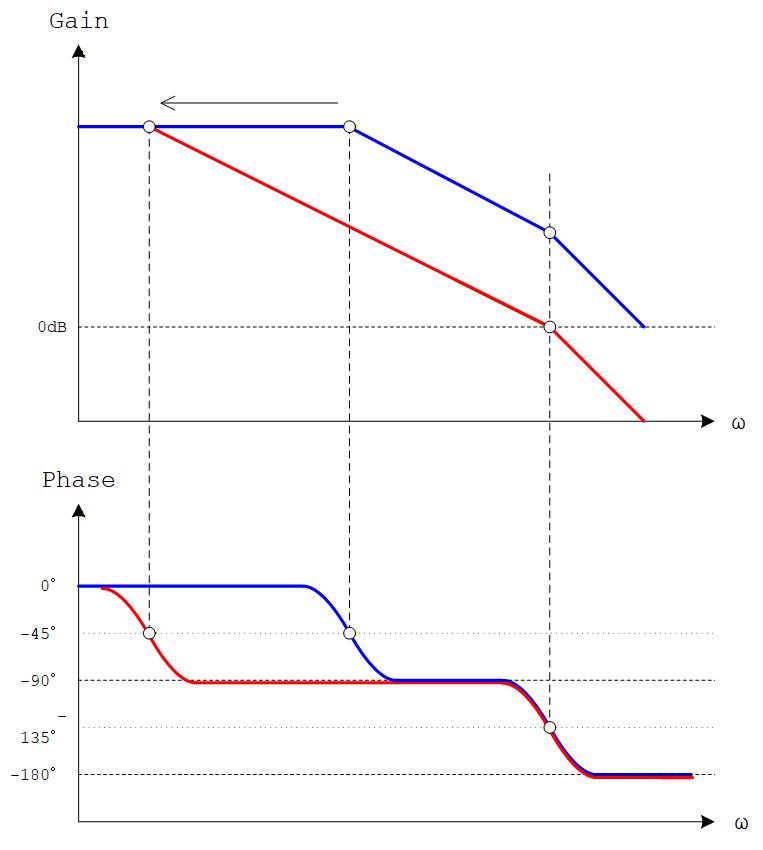
位相補償
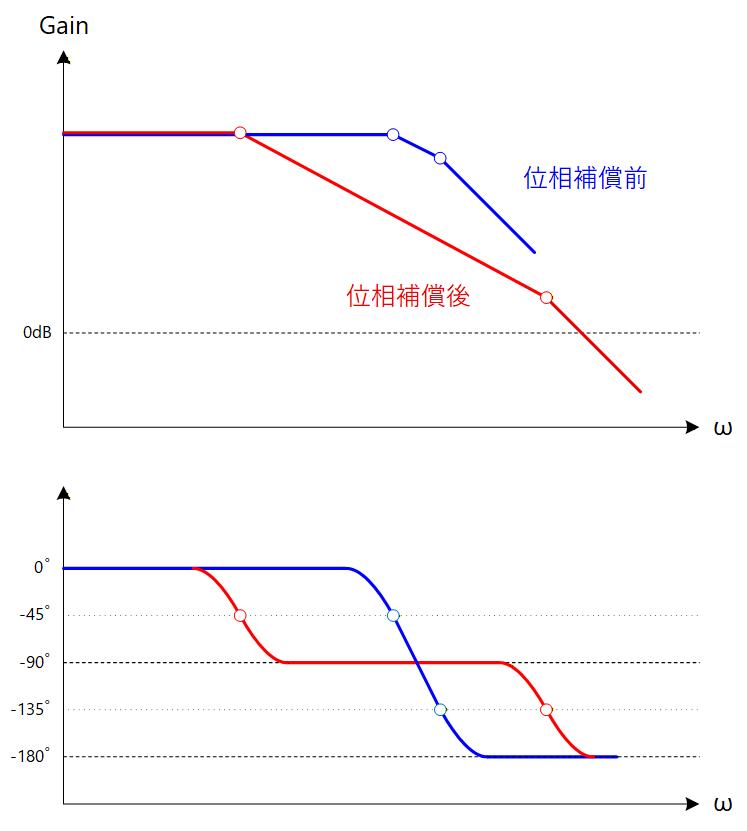
先のように、1st Pole と 2nd Pole の距離が近い場合には、位相余裕を稼ぐことが困難になります。(Fig. 1-6 青線)
1st Pole だけであれば位相は 90°までしか回らないため絶対に安定ですが、ゲインが 0dB まで落ちる前に 2nd Pole を迎えると位相は回り、180° に近づくために位相余裕はなくなって行きます。
つまり、1st Pole と 2nd Pole の間隔を空けて、2nd Pole が来るより前にゲインを落とすことが位相補償の基本的な考え方です。
Fig. 1-6
ひとこと
1st Pole をドミナントポールと呼び、その時の周波数と OpenLoop Gain をかけたものが GB積と呼ばれる、オペアンプの帯域を表す指標となります。
ゼロ・キャンセル法
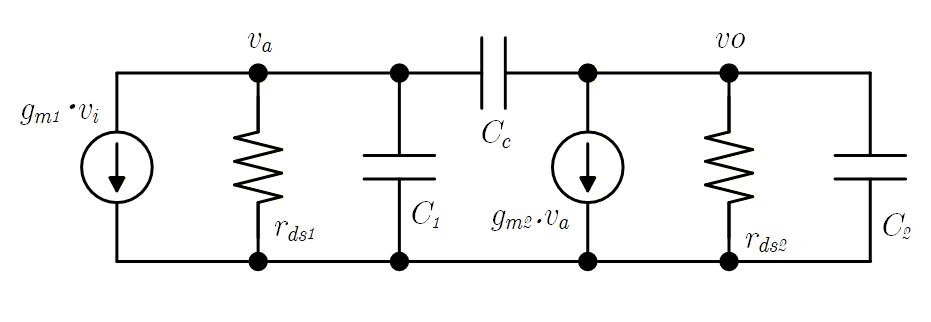
Fig. 1-7a に、位相補償を追加したオペアンプの回路図を示します。 位相補償は破線四角で囲んだ部分になり、補償容量は通常 C1 より大きく取るので、C1 は省略しています。
以下、小信号等価回路 (Fig. 1-7b) に基づいて伝達関数を算出します。
1st Stage の出力は、v a = g m 1 ⋅ v i ⋅ r d s 1 ⋅ ( R c + 1 s ⋅ C 1 ) r d s 1 + R c + 1 s ⋅ C 1 \displaystyle v_a=g_{m1}\cdot v_i \cdot \frac{r_{ds1}\cdot (R_c+\frac{1}{s\cdot C_1})}{r_{ds1}+R_c+\frac{1}{s\cdot C_1}}
整理するとv a v i = g m 1 ⋅ r d s 1 ⋅ ( 1 + s ⋅ C c ⋅ R c ) 1 + s ⋅ C c ⋅ ( R c + r d s 1 ) \displaystyle \frac{v_a}{v_i}=\frac{g_{m1}\cdot r_{ds1}\cdot (1+s\cdot C_c\cdot R_c)}{1+s\cdot C_c\cdot(R_c+ r_{ds1})}
通常は r d s 2 ≫ R c r_{ds2}\gg Rc v a v i ≑ g m 1 ⋅ r d s 1 ⋅ ( 1 + s ⋅ C c ⋅ R c ) 1 + s ⋅ C c ⋅ r d s 1 \displaystyle \frac{v_a}{v_i}\doteqdot \frac{g_{m1}\cdot r_{ds1}\cdot (1+s\cdot C_c\cdot R_c)}{1+s\cdot C_c\cdot r_{ds1}}
A 1 = g m 1 ⋅ r d s 1 A_1=g_{m1}\cdot r_{ds1} ω z = 1 C c ⋅ R c \omega_z=\frac{1}{C_c\cdot R_c} ω p 1 ′ = 1 C c ⋅ r d s 1 \omega’_{p1}=\frac{1}{C_c\cdot r_{ds1}} v a v i ≑ A 1 ⋅ ( 1 + s / ω z ) 1 + s / ω p 1 ′ \displaystyle \frac{v_a}{v_i}\doteqdot \frac{A_1\cdot (1+s/ \omega_z)}{1+s/\omega’_{p1} }
2nd Stage については位相補償前と変わらずv o v a = A 2 1 + s / ω p 2 \displaystyle \frac{v_o}{v_a}=\frac{A_2}{1+s/\omega_{p2}}
なのでトータルの入出力伝達関数はv o v i ≑ A 1 ⋅ ( 1 + s / ω z ) ( 1 + s / ω p 1 ′ ) ( 1 + ω p 2 ) \displaystyle \frac{v_o}{v_i}\doteqdot \frac{A_1\cdot (1+s/ \omega_z)}{(1+s/\omega’_{p1})(1+\omega_{p2})}
Fig. 1-7a
Fig. 1-7b
ひとこと
位相補償の R c R_c C c C_c C c C_c r d s 1 r_{ds1} C c C_c R c R_c r d s 1 / / R c ≑ R c r_{ds1}//R_c\doteqdot R_c g m 1 ⋅ R c g_{m1}\cdot R_c
以上の式から ω z = ω p 2 \omega_z=\omega_{p2} R c R_c C c C_c
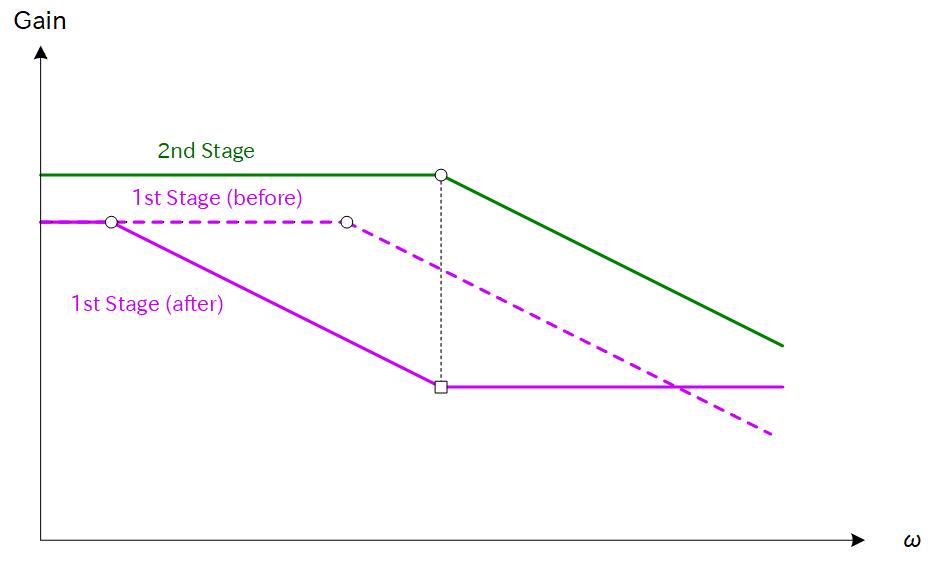
Fig. 1-8a に 1st stage, 2nd srage 個別の周波数特性を、Fig. 1-8b にトータルの周波数特性を示します。
Fig. 1-8a
Fig. 1-8b
ひとこと
ωp2 と ωz が厳密に一致してない場合でも、ωp2 とωz が極端に離れない限りは不安定にはならない。 (ボード線図上ではキンクが見えることになりますが…)
目次に戻る
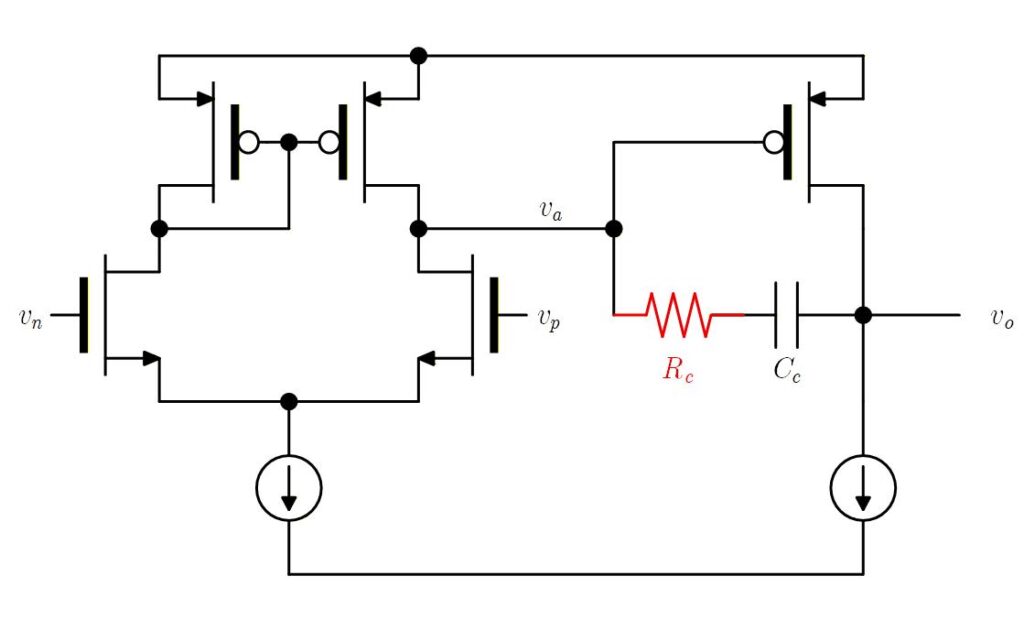
ポール・スプリット法 (ミラー補償)
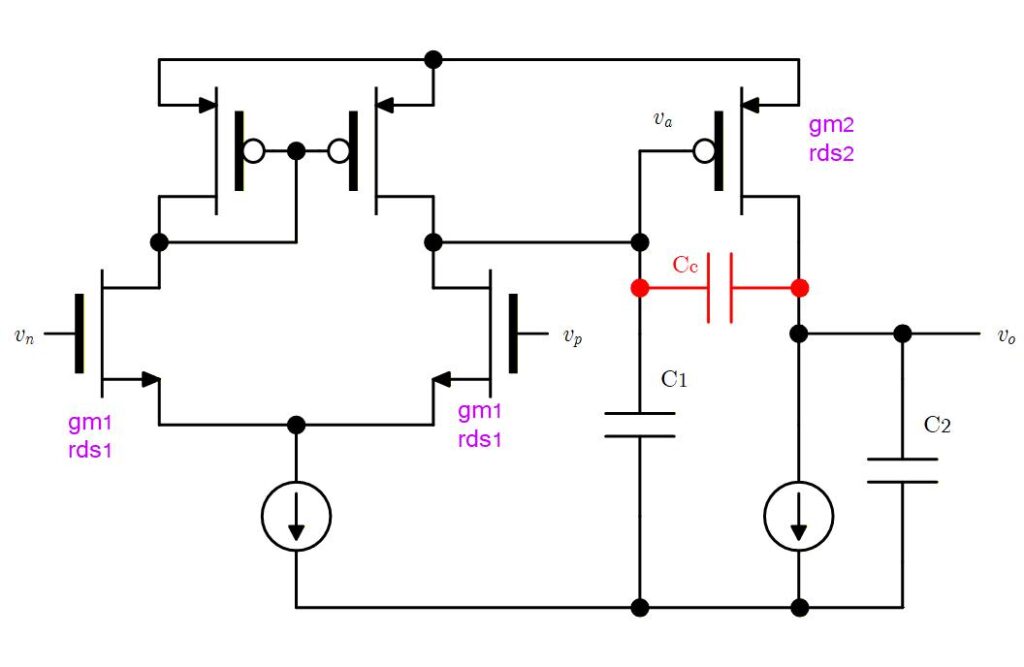
Fig. 1-9 に、2段増幅型オペアンプのもう一つの位相補償方法についての回路図を示します。 位相補償は赤字で示した部分であり、1st Stage の出力と 2nd Stage の出力との間に位相補償容量 Cc を追加します。
この位相補償容量は 2nd Stage のインバータの入力と出力との間に入るため、ミラー容量として働くことがポイントです。
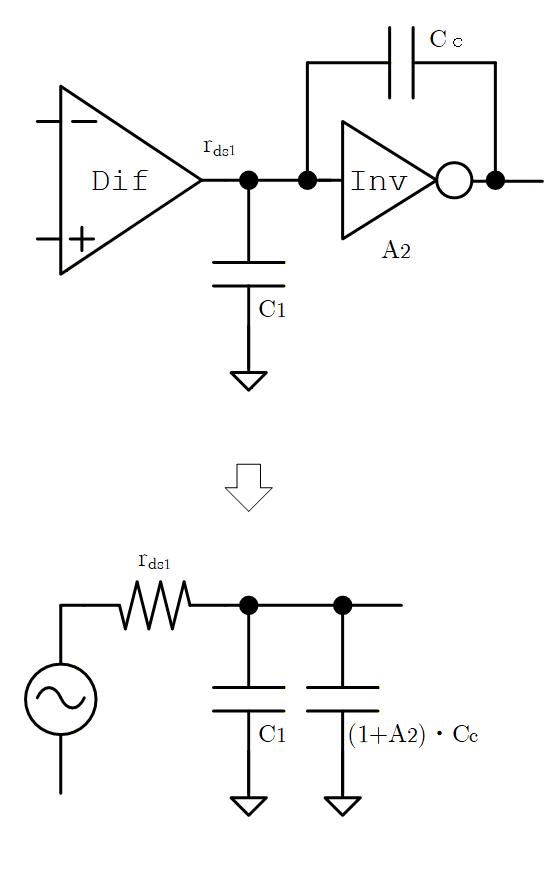
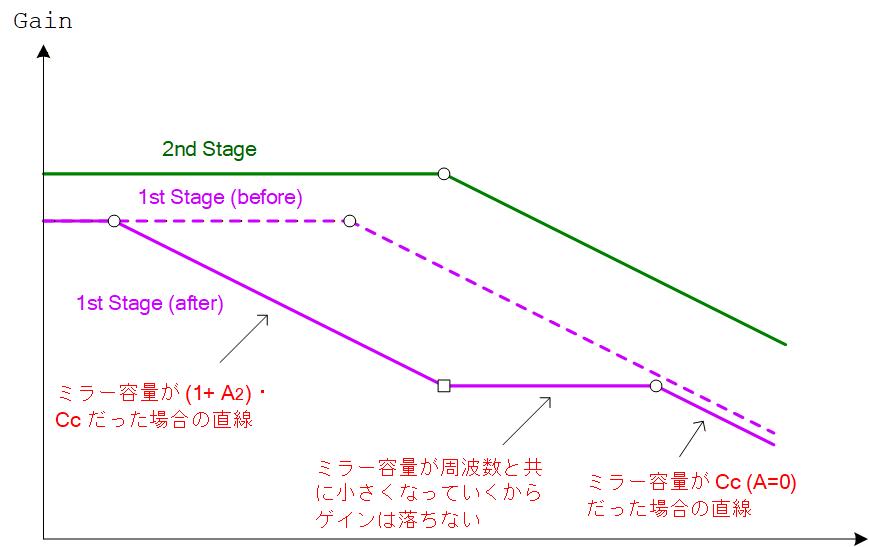
Fig. 1-10 に示すように、Cc をインバータのゲイン倍(× A 2 \times A_2 ≑ A 2 × C c \doteqdot A_2\times C_c r d s 1 r_{ds1} ω p 1 ′ \omega’_{p1}
Fig. 1-9
Fig. 1-10
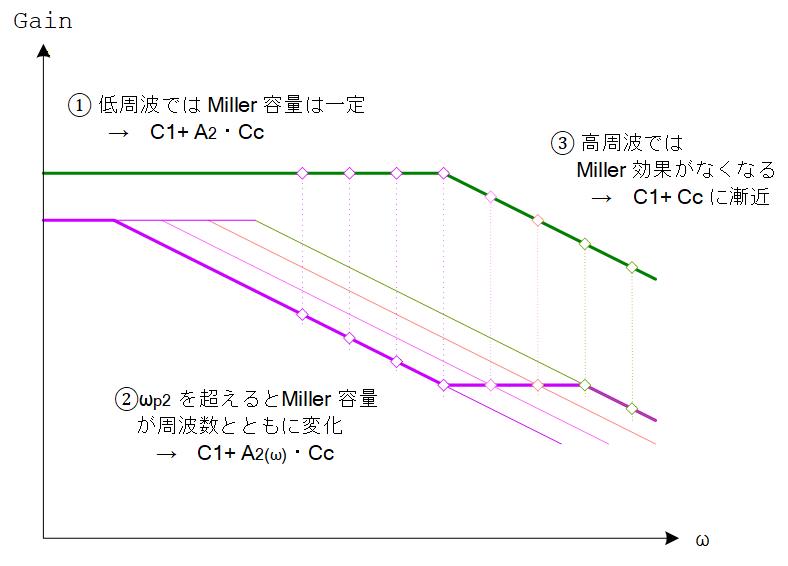
ここでミラー容量を使うとさらに好ましい効果があります。
それはミラー容量が周波数によって変わるということを利用しています。
さらにインバータのゲインが低下し 1 を割り込むと、もはやミラー容量は存在せず、それ以上の直線の移動は無くなり、再び周波数とともにゲインが落ち始めます。 つまりインバータのゲインが 0dB を割り込む周波数、つまりインバータの Unity Gain 周波数に達すると、ミラー効果がない場合の周波数特性と合致するため、そこで 再び直線は折れ曲がり、そこに Pole ができたかのように振る舞います。
Fig. 1-11
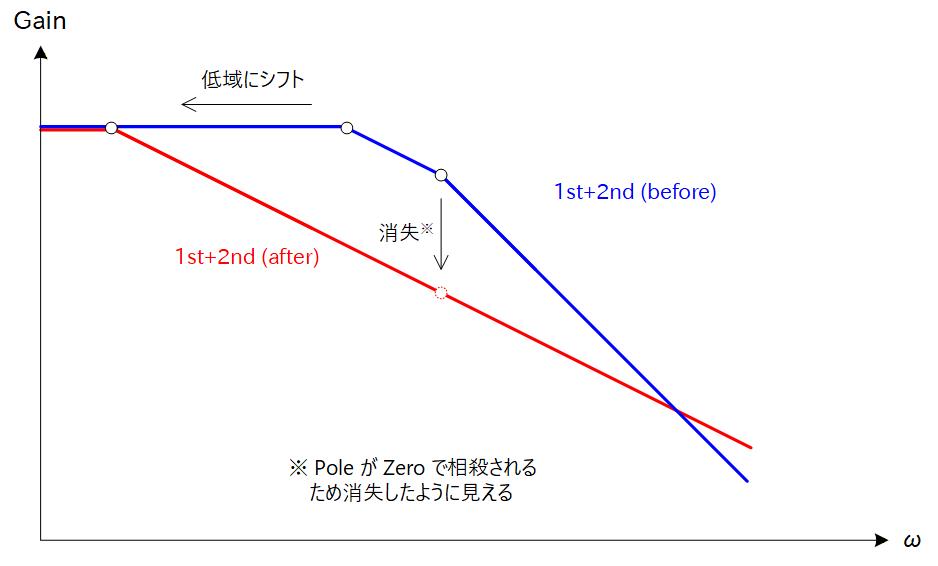
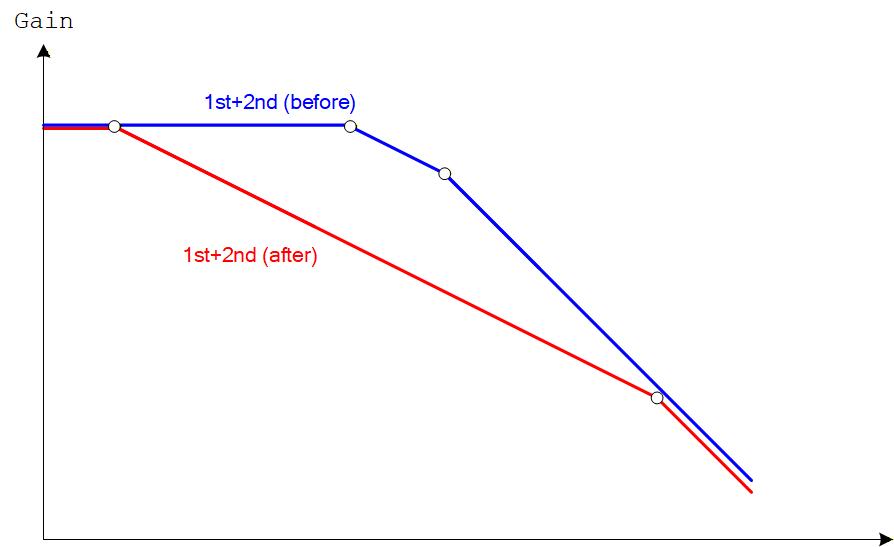
1st Stage, 2nd Stage の周波数特性を Fig. 1-12a に、トータルのアンプとしての周波数特性を Fig. 1-12b に示します。
位相補償前の 1st Pole はミラー容量で大きく低周波にシフトします。
そしてミラー効果がなくなって現れる 1st Stage の Pole が2nd Pole として現れるため、見かけ上位相補償前の 1st Pole が低周波側へ、2nd Pole が高周波側に移動することとなり、位相補償がなされます。
前節で述べたゼロ補償に比べてミラー容量を使うことで、位相補償容量を小さくできる ことが特徴です。
Fig. 1-12a
Fig. 1-12b
ひとこと
まともに小信号解析を行うと計算式が非常に煩雑になるため、ここではボード線図を使った定性的な説明にとどめ、数式を使った定量的な説明は Appendix で行います。
これまでミラー容量による位相補償について定性的な説明をしましたが、ここからは小信号入出力特性の計算結果をベースに定量的な解析を行います。
Fig. 1-13a には位相補償しない場合の小信号等価回路を示しますが、それに対応する入出力特性は以下の式で表されます。v o v i = g m 1 ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 ( 1 + s ⋅ C 1 ⋅ r d s 1 ) ( 1 + s ⋅ C 2 ⋅ r d s 2 ) \displaystyle \frac{v_o}{v_i}=\frac{g_{m1}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2}}{(1+s\cdot C_1\cdot r_{ds1})(1+s\cdot C_2\cdot r_{ds2})}
ここで、A 0 = g m 1 ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 A_0=g_{m1}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2} ω p 1 = 1 C 1 ⋅ r d s 1 \omega_{p1}=\frac{1}{C_1\cdot r_{ds1}} ω p 2 = 1 C 1 ⋅ r d s 2 \omega_{p2}=\frac{1}{C_1\cdot r_{ds2}} v o v i = A 0 ( 1 + s / ω p 1 ) ( 1 + s / ω p 2 ) \displaystyle \frac{v_o}{v_i}=\frac{A_0}{(1+s/\omega_{p1})(1+s/\omega_{p2})}
となります。
Fig. 1-13b には位相補償を行った場合の小信号等価回路を示しますが、それらに対応する入出力特性は以下の式で表されます。v o v i ≑ A 0 ( 1 − s ⋅ C c g m 2 ) ( 1 + s / ω p 1 ′ ) ⋅ ( 1 + s / ω p ′ 2 ) \displaystyle \frac{v_{o}}{v_{i}}\doteqdot\frac{A_{0}\left(1-s\cdot\frac{C_{c}}{g_{m2}}\right)}{\left(1+s/\omega_{p1}^{\prime}\right)\cdot\left(1+s/\omega_{p}^{\prime}2\right)}
ここで、ω p 1 ′ = 1 r d s 1 ⋅ C c ⋅ ( g m 2 ⋅ r d s 2 ) \displaystyle \omega’_{p1}=\frac{1}{r_{ds1}\cdot C_c\cdot (g_{m2}\cdot r_{ds2})}
ω p 2 ′ = g m 2 C 1 + C 2 + C 1 ⋅ C 2 C s ≑ g m 2 C 1 + C 2 \displaystyle \omega’_{p2}=\frac{g_{m2}}{C_1+C_2+\frac{C_1\cdot C_2}{C_s}}\doteqdot \frac{g_{m2}}{C_1+C_2}
ω z = g m 2 C c \displaystyle \omega_z=\frac{g_{m2}}{C_c}
ω p 1 ′ \omega’_{p1} C c C_c ≑ g m 2 ⋅ r d s 2 \doteqdot g_{m2}\cdot r_{ds2} r d s 1 r_{ds1} ω p 1 \omega_{p1}
また ω p 2 ′ \omega’_{p2} 1 g m 2 ≪ r d s 2 \frac{1}{g_{m2}}\ll r_{ds2} ω p 2 \omega_{p2} = 1 C 2 ⋅ r d s 2 =\frac{1}{C_2\cdot r_{ds2}}
以上から、位相補償により 1st Pole は超低周波に、2nd Pole は超高周波にスプリットされることがわかります。
Fig. 1-13a
Fig. 1-13b
これだけであれば万々歳なのですが、入出力伝達関数の分子に ( 1 − s ⋅ C c g m 2 ) \left(1-s\cdot\frac{C_{c}}{g_{m2}}\right)
伝達関数の分子=0 となる s は Zero点 ですが、その Zero 点が s平面の右半面にあるため、これを右半面 Zero と呼び、”悪玉 Zero” とも呼ばれます。 (これに対応して左半面 Zero は、”善玉 Zero” と呼ばれます)
Fig. 1-14
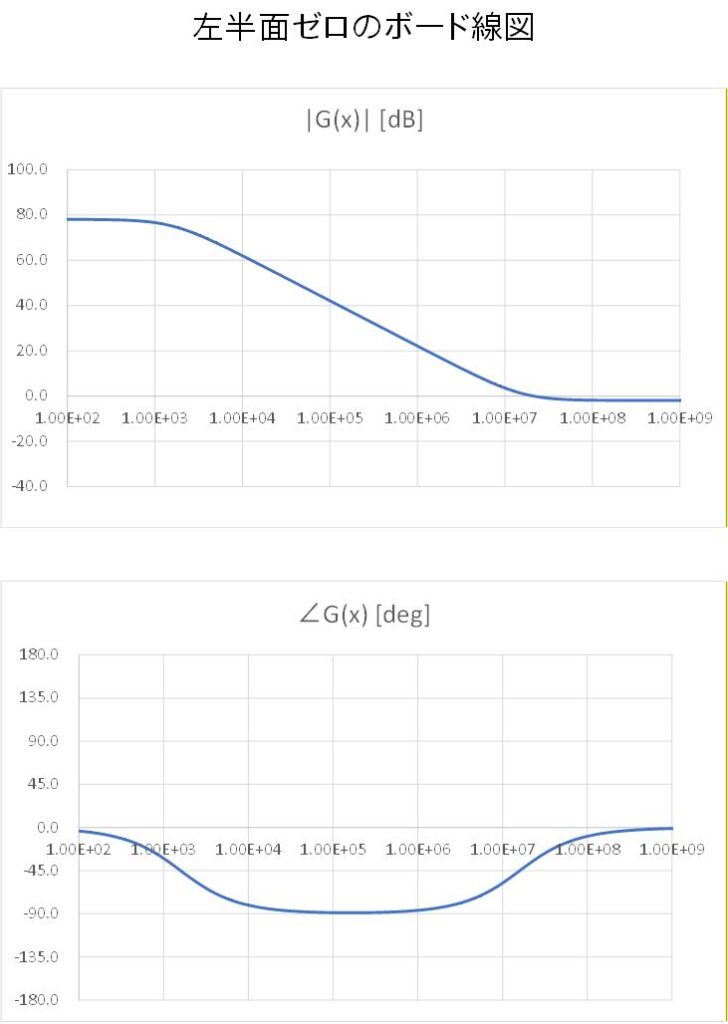
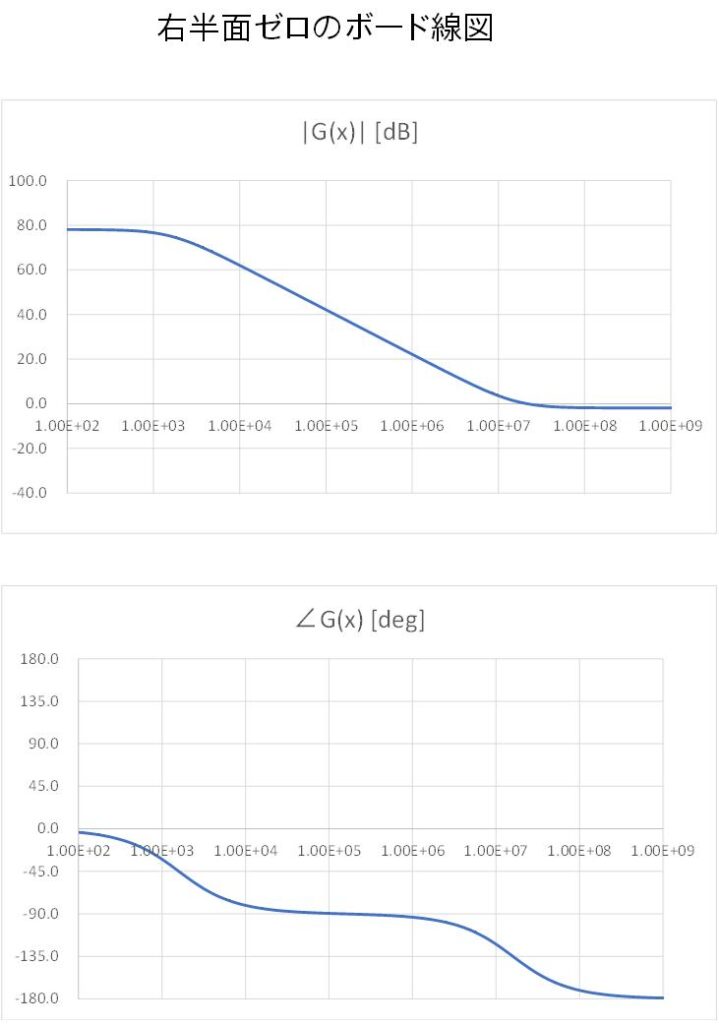
Fig. 1-15a に通常の微分回路などで発生する左半面 Zero の場合のボード線図、Fig. 1-15b に右半面 Zero があった場合のボード線図を示します。
1st Pole 周波数から 20dB/dec で減衰し、Zero 周波数に達するとゲインが落ちずにフラットになるのは同じですが、左半面 Zero の場合には位相が回復するのに対して、右半面 Zero の場合には位相が遅れ、180° に近づきます。
つまり右半面 Zero の場合は位相だけに着目すると、Pole があるように振る舞い、しかも落ちて欲しいゲインが逆に回復してしまうため、まさに “悪玉” です。
ミラー容量を使ったポールスプリット型の位相補償を行う場合は、そのの欠点である右半面 Zero を消してやる必要があります。
Fig. 1-15a
Fig. 1-15b
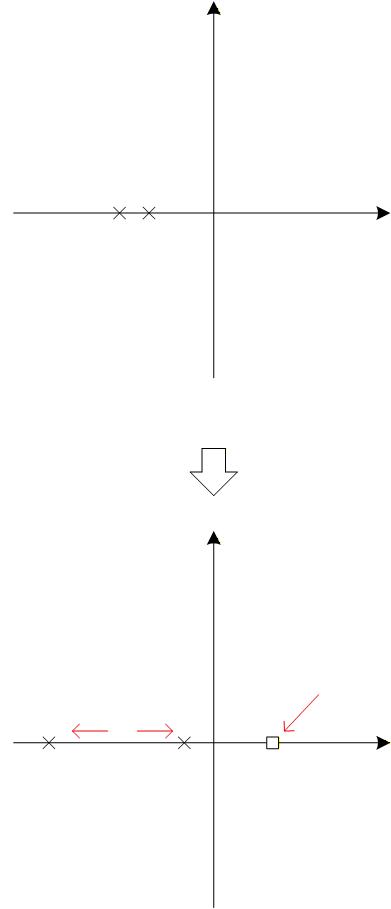
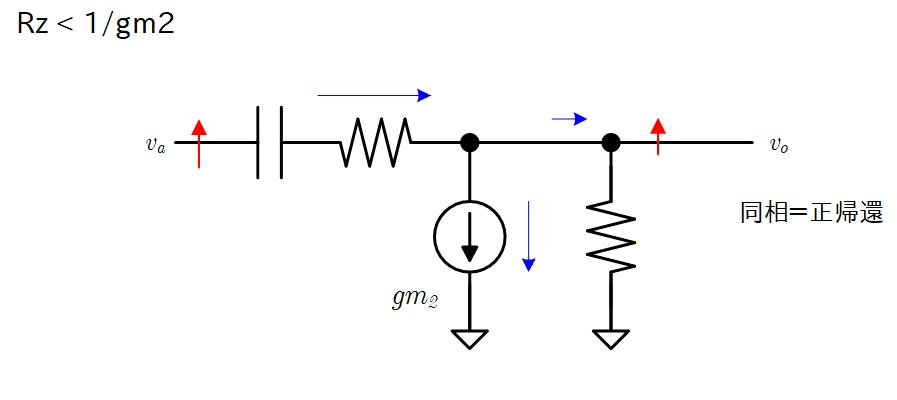
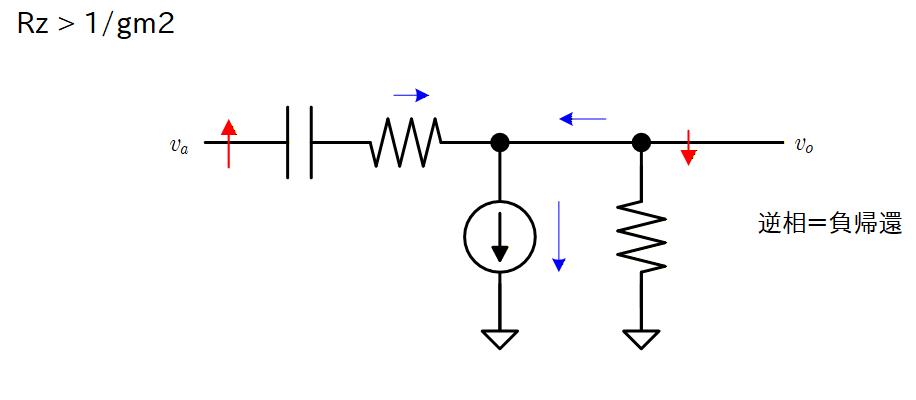
右半面 Zero を消去するためには、Fig. 1-16 のように補償容量に直列に電流制限抵抗を挿入します。
こと抵抗を挿入しだ場合の Zero の角周波数は次式で与えられます。1 ω z = C c ⋅ ( R c − 1 g m 2 ) \displaystyle \frac{1}{\omega_z}=C_c\cdot (R_c-\frac{1}{g_{m2}})
式からわかるように R c = 0 R_c=0 R c < 1 g m 2 R_c\lt\frac{1}{g_{m2}} R c > 1 g m 2 R_c\gt\frac{1}{g_{m2}}
この時、何が起きているかを Fig. 1-17 の位相補償容量・電流制限抵抗周りの小信号等価回路図で説明します。
低周波では容量のインピーダンスは高いので、1st stage と 2nd stage ほ完全に分離されています。 ところが、l高周波になるとインピーダンスが下がるため 1st stage で発生する電流が 2nd Stage に流入します。
Fig. 1-17a のように R c < 1 g m 2 R_c\lt\frac{1}{g_{m2}} g m 2 g_{m2}
これに対して R c > 1 g m 2 R_c\gt\frac{1}{g_{m2}} g m 2 g_{m2}
Fig. 1-16
Fig. 1-17a
Fig. 1-17b
Appendix-1 に電流制限抵抗を加えた場合の小信号入出力伝達関数の式の導出過程を示しますが、結果としては次式で与えられます。v o v i = A 0 ⋅ { 1 + s ⋅ C c ⋅ ( R c − 1 g m 2 ) } 1 + s / ω p 1 ′ \displaystyle \frac{v_{o}}{v_{i}}=\displaystyle \frac{A_{0}\cdot\left\{1+s\cdot C_{c}\cdot\left(R_{c}-\frac{1}{g_{m2}}\right)\right\}}{1+s/\omega_{p1}^{\prime}}
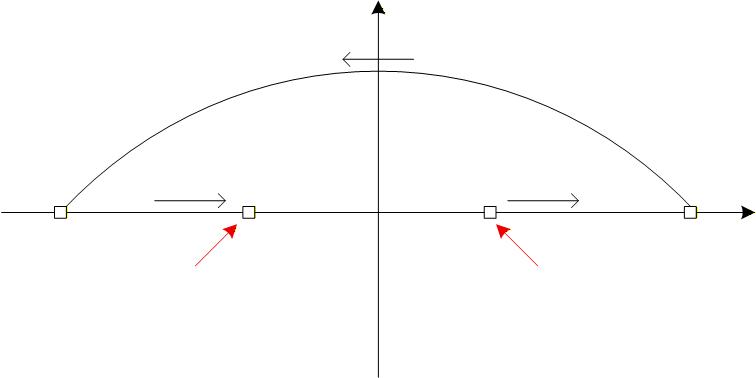
Fig. 1-18 に R c R_c
R c = 0 R_c=0 ω = + g m 2 C c \omega =+\frac{g_{m2}}{C_c} R c R_c R c = 1 g m 2 R_c=\frac{1}{g_{m2}} ω = + ∞ \omega =+\infty ω = − ∞ \omega =-\infty R c R_c
R c = 2 g m 2 R_c=\frac{2}{g_{m2}}
Fig. 1-18
ひとこと
通常、マージンを持たせるために R c = 2 g m 2 R_c=\frac{2}{g_{m2}}
目次に戻る
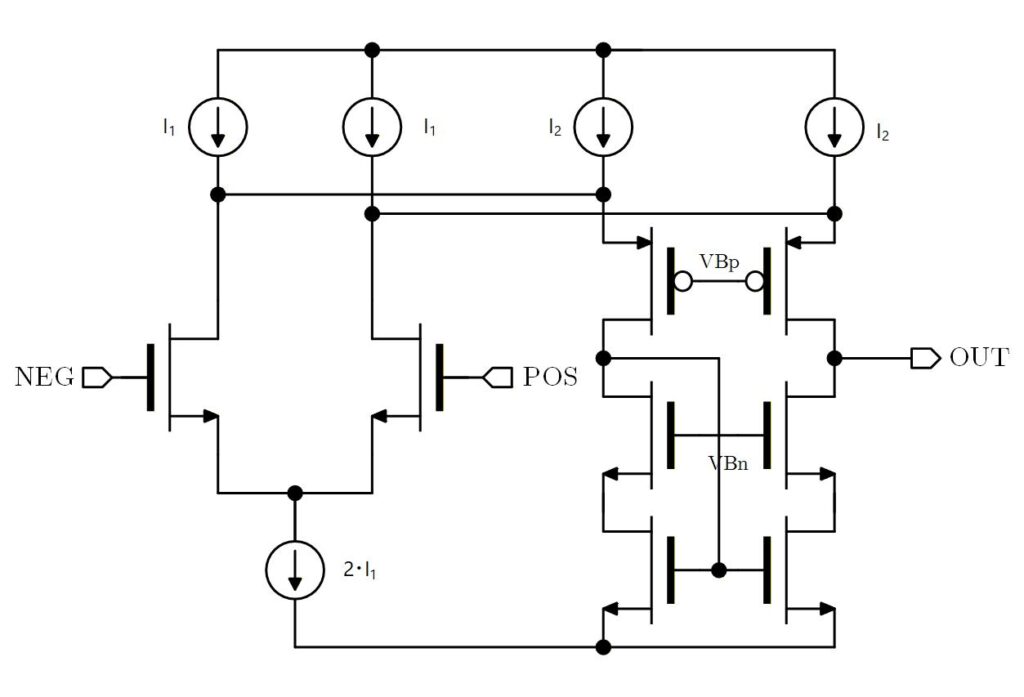
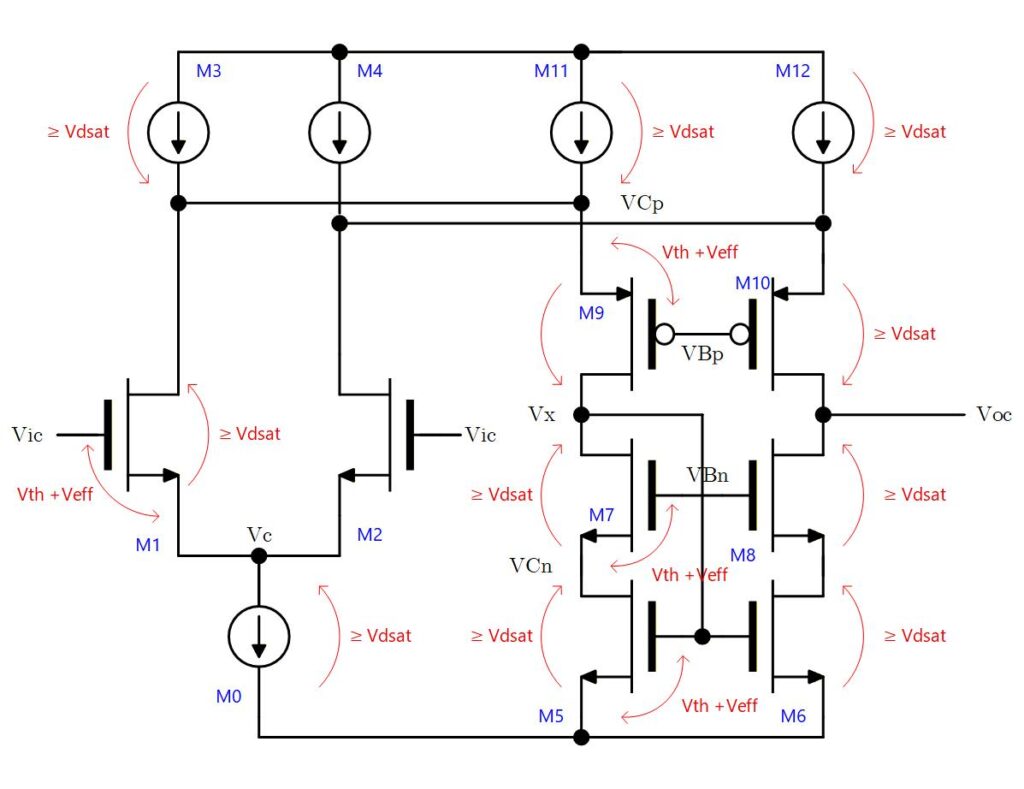
Cascode 型 CMOS オペアンプの設計
オペアンプの代表的な回路トポロジとして、Fig. 2-1 のような Cascode 型の回路があります。
2nd Stage で Cascode 接続を用いることで “出力抵抗の増幅” を行い、高いゲインを稼ぐことがポイントです。
この節ではこのトポロジーの回路について、
Fig. 2-1
目次に戻る
DC 動作点解析
はじめに上記トポロジの Cascode 型オペアンプが成り立つための前提・制約を示します。
まず V C p VC_p Δ V c a s \Delta V_{cas} V C p = V d d − V d s a t − Δ V c a s VC_p=V_{dd}-V_{dsat}-\Delta V_{cas}
となるように V B p VB_p V C n VC_n Δ V c a s \Delta V_{cas} V C n = V d s a t + Δ V c a s VC_n=V_{dsat}+\Delta V_{cas}
となるように V B n VB_n V g s V_{gs} V x = V t h + V e f f V_x=V_{th}+V_{eff}
M7 の 5極管条件からV x > V C n + V d s a t V_x\gt VC_n+V_{dsat}
② を ④ に代入するとV C n > V d s a t + Δ V c a s + V d s a t VC_n\gt V_{dsat}+\Delta V_{cas}+V_{dsat}
したがって、④, ⑤ からV t h + V d s a t > 2 ⋅ V d s a t + Δ V c a s V_{th}+V_{dsat}\gt 2\cdot V_{dsat}+\Delta V_{cas} V t h > V d s a t + Δ V c a s V_{th}\gt V_{dsat}+\Delta V_{cas}
実はこれが Cascode 型オペアンプが実現できるかどうかの判定ポイントになります。
このように Diode 接続されたトランジスタに Cascode トランジスタが挿入できるかどうかは V t h V_{th} V t h V_{th} の低いトランジスタでは実現できない ことに注意が必要です。
Fig. 2-2
以下、上記の前提・制約を満足しているとして動作点解析を進めます。
まず、V c V_c V c > V d s a t V_c\gt V_{dsat}
M1 (M2) の V g s V_{gs} V i c − V c = V t h + V e f f V_{ic}-V_c=V_{th}+V_{eff} V c = V i c − V t h − V e f f V_c=V_{ic}-V_{th}-V_{eff}
⑥, ⑦ からV i c − V t h − V e f f > V d s a t V_{ic}-V_{th}-V_{eff}\gt V_{dsat}
この式を変形してV i c > V t h + V e f f + V d s a t V_{ic}\gt V_{th}+V_{eff}+V_{dsat}
以上から差動対の入力電圧 V i c V_{ic} 下限値 がわかります。
次に VCp のノードについてV C p > V c + V d s a t VC_p\gt V_{c}+V_{dsat}
⑧ に ⑦ を代入してV C p > V i c − V t h − V e f f VC_p\gt V_{ic}-V_{th}-V_{eff}
⑨ に ① を代入するとV d d − V d s a t − Δ V c a s V_{dd}-V_{dsat}-\Delta V_{cas} > V i c − V t h − V e f f + V d s a t \gt V_{ic}-V_{th}-V_{eff}+V_{dsat}
この式を変形してV i c < V d d + V t h − 2 ⋅ V d s a t − Δ V c a s V_{ic}\lt V_{dd}+V_{th}-2\cdot V_{dsat}-\Delta V_{cas}
以上から差動対の入力電圧 V i c V_{ic} 上限値 がわかります。
最後に出力 V o V_o V o < V a − V d s a t V_o\lt V_a-V_{dsat}
① を ⑪ に代入するとV o < V d d − 2 ⋅ V d s a t − Δ V c a s V_o\lt V_{dd}-2\cdot V_{dsat}-\Delta V_{cas}
同様に M8 の 5極管条件からV o > V C n + 2 ⋅ V d s a t V_o\gt VC_n+2\cdot V_{dsat}
② を ⑫ に代入するとV o > 2 ⋅ V d s a t + Δ V c a s V_o\gt 2\cdot V_{dsat}+\Delta V_{cas}
が得られます。
具体的な数値を例にして、Cascode オペアンプが成立する前提条件を確認してみます。
まず V t h = 0.6 V V_{th}=0.6V V d s a t = 0.2 V V_{dsat}=0.2V Δ V c a s = 0.1 V \Delta V_{cas}=0.1V V t h > V d s a t + Δ V c a s V_{th}\gt V_{dsat}+\Delta V_{cas}
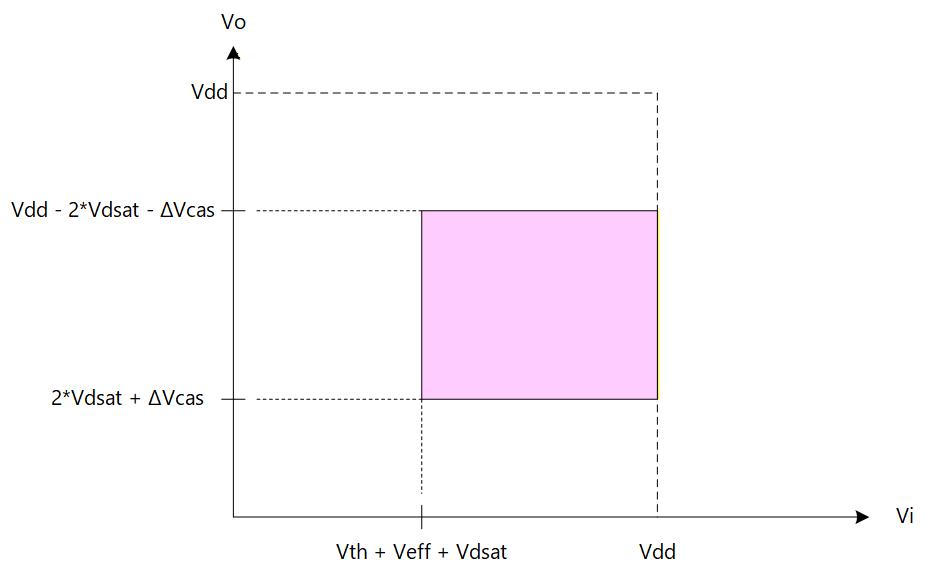
上記の条件以外に具体的な数値として例えば、V d d = 1.8 V V_{dd}=1.8V V e f f = 0.2 V V_{eff}=0.2V V t h + V e f f + V d s a t < V i c V_{th}+V_{eff}+V_{dsat}\lt V_{ic} < V d d + V t h − 2 ⋅ V d s a t = Δ V c a s \lt V_{dd}+V_{th}-2\cdot V_{dsat}= \Delta V_{cas} 1.0 < V i c < 1.9 1.0\lt V_{ic}\lt 1.9
これは入力として電源電圧に達するような電圧の信号も受けることができることを示しています。
一方、出力の電圧範囲はΔ V c a s + 2 ⋅ V d s a t < V o \Delta V_{cas}+2\cdot V_{dsat}\lt V_o < V d d − 2 ⋅ V d s a t − Δ V c a s \lt V_{dd}-2\cdot V_{dsat}-\Delta V_{cas} 0.5 < V o < 1.3 0.5\lt V_o\lt 1.3
以上から、このオペアンプの入出力電圧のダイアグラムは Fig. 2-3 のように書けます。
Fig. 2-3
目次に戻る
AC 小信号位相補 ドミナントポール・シフト
Cascode 型のオペアンプは出力抵抗が極めて大きいため、負荷容量と出力抵抗で形成される 1st Pole (Dominant Pole) が非常に低い周波にできます。
これに対して Cascode Current Mirror や他の回路によって発生する寄生的な 2nd Pole は比較的高周波にできるので、2段増幅型のオペアンプに比べて位相余裕は確保しやすく、なにもしなくても安定条件で使えることもあります。
しかし、それでも位相余裕が十分ではない場合は、出力ノードに位相補償用の容量を追加することで、ドミナントポールシフトによる位相補償を行います。
すなわち、ゲインが十分落ちたところで 2nd Pole が来るように
Fig. 2-8
ひとこと
オペアンプの出力をチップ外に出力するなど、出力の負荷容量が巨大になる場合に 2段増幅型のオペアンプを使おうとすると、2nd Stage の Pole が超低周波側に来るために位相補償が困難になる場合があります。
目次に戻る
Appendix-1 ポール・スプリット位相補償の小信号解析 電流制限抵抗がない場合
電流制限抵抗がない場合の小信号等価回路を Fig. A1-1 に示します。
Fig. A1-1
まず v a v_{a} g m 1 ⋅ v i + v a r d s 1 + s ⋅ C 1 ⋅ v a + s ⋅ C c ⋅ ( v a − v o ) = 0 g_{m1}\displaystyle \cdot v_{i}+\frac{v_{a}}{r_{ds1}}+s\cdot C_{1}\cdot v_{a}+s\cdot C_{c}\cdot\left(v_{a}-v_{o}\right)=0
( 1 r d s 1 + s ⋅ C 1 + s ⋅ C c ) ⋅ v a = s ⋅ C c ⋅ v o − g m 1 ⋅ v i \left(\frac{1}{r_{ds1}}+s\cdot C_{1}+s\cdot C_{c}\right)\cdot v_{a}=s\cdot C_{c}\cdot v_{o}-g_{m1}\cdot v_{i}
v a = s ⋅ C c ⋅ v o − g m 1 ⋅ v i 1 r d s 1 + s ⋅ C 1 + s ⋅ C c = s ⋅ C c ⋅ r d s 1 ⋅ v o − g m 1 ⋅ r d s 1 ⋅ v i 1 + s ⋅ ( C 1 + C c ) ⋅ r d s 1 v_{a}=\displaystyle \frac{s\cdot C_{c}\cdot v_{o}-g_{m1}\cdot v_{i}}{\frac{1}{r_{ds1}}+s\cdot C_{1}+s\cdot C_{c}}=\frac{s\cdot C_{c}\cdot r_{ds1}\cdot v_{o}-g_{m1}\cdot r_{ds1}\cdot v_{i}}{1+s\cdot\left(C_{1}+C_{c}\right)\cdot r_{ds1}}
続いて v o v_{o} s ⋅ C c ⋅ ( v a − v o ) − g m 2 ⋅ v a − s ⋅ C 2 ⋅ v o − v o r d s 2 = 0 s\displaystyle \cdot C_{c}\cdot\left(v_{a}-v_{o}\right)-g_{m2}\cdot v_{a}-s\cdot C_{2}\cdot v_{o}-\frac{v_{o}}{r_{ds2}}=0
( s ⋅ C c − g m 2 ) ⋅ v a = { s ⋅ ( C c + C 2 ) + 1 r d s 2 } ⋅ v o \left(s\cdot C_{c}-g_{m2}\right)\cdot v_{a}=\left\{s\cdot\left(C_{c}+C_{2}\right)+\frac{1}{r_{ds2}}\right\}\cdot v_{o}
v o = s ⋅ C c − g m 2 s ・ ( C c + C 2 ) + 1 r d s 2 ⋅ v a = ( s ⋅ C c − g m 2 ) ⋅ r d s 2 1 + s ・ ( C c + C 2 ) ⋅ r d s 2 ⋅ v a v_{o}=\displaystyle \frac{s\cdot C_{c}-g_{m2}}{s\text{・}\left(C_{c}+C_{2}\right)+\frac{1}{r_{ds2}}}\cdot v_{a}=\frac{\left(s\cdot C_{c}-g_{m2}\right)\cdot r_{ds2}}{1+s\text{・}\left(C_{c}+C_{2}\right)\cdot r_{ds2}}\cdot v_{a}
①を②に代入するとv o = ( s ⋅ C c − g m 2 ) ⋅ r d s 2 1 + s ⋅ ( C c + C 2 ) ⋅ r d s 2 ⋅ s ⋅ C c ⋅ r d s 1 ⋅ v o − g m 1 ⋅ r d s 1 ⋅ v i 1 + s ⋅ ( C c + C 1 ) ⋅ r d s 1 v_{o}=\displaystyle \frac{\left(s\cdot C_{c}-g_{m2}\right)\cdot r_{ds2}}{1+s\cdot\left(C_{c}+C_{2}\right)\cdot r_{ds2}}\cdot\frac{s\cdot C_{c}\cdot r_{ds1}\cdot v_{o}-g_{m1}\cdot r_{ds1}\cdot v_{i}}{1+s\cdot\left(C_{c}+C_{1}\right)\cdot r_{ds1}}
{ 1 + s ⋅ ( C 1 + C c ) ⋅ r d s 1 } ⋅ { 1 + s ⋅ ( C 2 + C c ) ⋅ r d s 2 } ⋅ v o \left\{1+s\cdot\left(C_{1}+C_{c}\right)\cdot r_{ds1}\right\}\cdot\left\{1+s\cdot\left(C_{2}+C_{c}\right)\cdot r_{ds2}\right\}\cdot v_{o} = ( s ⋅ C c − g m 2 ) ⋅ r d s 2 ⋅ s ⋅ C c ⋅ r d s 1 ⋅ v o − g m 1 ⋅ r d s 1 ( s ⋅ C c − g m 2 ) ⋅ r d s 2 ⋅ v i =\left(s\cdot C_{c}-g_{m2}\right)\cdot r_{ds2}\cdot s\cdot C_{c}\cdot r_{ds1}\cdot v_{o}-g_{m1}\cdot r_{ds1}\left(s\cdot C_{c}-g_{m2}\right)\cdot r_{ds2}\cdot v_{i}
[ { 1 + s ・ ( C 1 + C c ) ⋅ r d s 1 } ⋅ { 1 + s ⋅ ( C 2 s ⋅ C c ) ⋅ r d s 2 } − ( s ⋅ C c − g m 2 ) ⋅ r d s 2 ⋅ s ⋅ C c ⋅ r d s 1 ] \left[\left\{1+s\text{・}\left(C_{1}+C_{c}\right)\cdot r_{ds1}\right\}\cdot\left\{1+s\cdot\left(C_{2}s\cdot C_{c}\right)\cdot r_{ds2}\right\}-\left(s\cdot C_{c}-g_{m2}\right)\cdot r_{ds2}\cdot s\cdot C_{c}\cdot r_{ds1}\right] = − g m 1 ⋅ r d s 1 ( s ⋅ C c − g m 2 ) ⋅ r d s 2 ⋅ v i =-g_{m1}\cdot r_{ds1}\left(s\cdot C_{c}-g_{m2}\right)\cdot r_{ds2}\cdot v_{i}
v o v i = − g m 1 ⋅ r d s 1 ( s ⋅ C c − g m 2 ) ⋅ r d s 2 { 1 + s ・ ( C 1 + C c ) ⋅ r d s 1 } ⋅ { 1 + s ⋅ ( C 2 + C c ) ⋅ r d s 2 } − ( s ⋅ C c − g m 2 ) ⋅ r d s 2 ⋅ s ⋅ C c ⋅ r d s 1 \displaystyle \frac{v_{o}}{v_{i}}=\frac{-g_{m1}\cdot r_{ds1}\left(s\cdot C_{c}-g_{m2}\right)\cdot r_{ds2}}{\left\{1+s\text{・}\left(C_{1}+C_{c}\right)\cdot r_{ds1}\right\}\cdot\left\{1+s\cdot\left(C_{2}+C_{c}\right)\cdot r_{ds2}\right\}-\left(s\cdot C_{c}-g_{m2}\right)\cdot r_{ds2}\cdot s\cdot C_{c}\cdot r_{ds1}} = − g m 1 ⋅ r d s 1 ( s ⋅ C c − g m 2 ) ⋅ r d s 2 1 + s ・ ( C 1 + C c ) ⋅ r d s 1 + s ⋅ ( C 2 + C c ) ⋅ r d s 2 + s 2 ⋅ ( C 1 + C c ) ⋅ r d s 1 ⋅ ( C 2 + C c ) ⋅ r d s 2 − s 2 ⋅ C c 2 ⋅ r d s 1 ⋅ r d s 2 + g m 2 ⋅ r d s 2 ⋅ s ⋅ C c ⋅ r d s 1 =\displaystyle \frac{-g_{m1}\cdot r_{ds1}\left(s\cdot C_{c}-g_{m2}\right)\cdot r_{ds2}}{1+s\text{・}\left(C_{1}+C_{c}\right)\cdot r_{ds1}+s\cdot\left(C_{2}+C_{c}\right)\cdot r_{ds2}+s^{2}\cdot\left(C_{1}+C_{c}\right)\cdot r_{ds1}\cdot\left(C_{2}+C_{c}\right)\cdot r_{ds2}-s^{2}\cdot C_{c}^{2}\cdot r_{ds1}\cdot r_{ds2}+g_{m2}\cdot r_{ds2}\cdot s\cdot C_{c}\cdot r_{ds1}} = − g m 1 ⋅ r d s 1 ( s ⋅ C c − g m 2 ) ⋅ r d s 2 1 + s ⋅ { ( C 1 + C c ) ⋅ r d s 1 + ( C 2 + C c ) ⋅ r d s 2 + g m 2 ⋅ r d s 2 ⋅ C c ⋅ r d s 1 } + s 2 ⋅ r d s 1 ⋅ r d s 2 ⋅ { C 1 ⋅ C 2 + ( C 1 + C c ) ⋅ C c } =\displaystyle \frac{-g_{m1}\cdot r_{ds1}\left(s\cdot C_{c}-g_{m2}\right)\cdot r_{ds2}}{1+s\cdot\left\{\left(C_{1}+C_{c}\right)\cdot r_{ds1}+\left(C_{2}+C_{c}\right)\cdot r_{ds2}+g_{m2}\cdot r_{ds2}\cdot C_{c}\cdot r_{ds1}\right\}+s^{2}\cdot r_{ds1}\cdot r_{ds2}\cdot\left\{C_{1}\cdot C_{2}+\left(C_{1}+C_{c}\right)\cdot C_{c}\right\}}
ここで、g m 2 ⋅ r d s 2 ⋅ C c ⋅ r d s 1 ≫ ( C 1 + C c ) ⋅ r d s 1 + ( C 2 + C c ) ⋅ r d s 2 g_{m2}\cdot r_{ds2}\cdot C_{c}\cdot r_{ds1}\gg\left(C_{1}+C_{c}\right)\cdot r_{ds1}+\left(C_{2}+C_{c}\right)\cdot r_{ds2}
かつ、g m 2 ⋅ r d s 2 ⋅ C c ⋅ r d s 1 ≫ C 1 ⋅ C 2 + ( C 1 + C 2 ) ⋅ C c g m 2 ⋅ C c g_{m2}\displaystyle \cdot r_{ds2}\cdot C_{c}\cdot r_{ds1}\gg\frac{C_{1}\cdot C_{2}+\left(C_{1}+C_{2}\right)\cdot C_{c}}{g_{m2}\cdot C_{c}}
なので、( C 1 + C c ) ⋅ r d s 1 + ( C 2 + C c ) ⋅ r d s 2 ≡ C 1 ⋅ C 2 + ( C 1 + C 2 ) ⋅ C c g m 2 ⋅ C c \displaystyle \left(C_{1}+C_{c}\right)\cdot r_{ds1}+\left(C_{2}+C_{c}\right)\cdot r_{ds2}\equiv\frac{C_{1}\cdot C_{2}+\left(C_{1}+C_{2}\right)\cdot C_{c}}{g_{m2}\cdot C_{c}}
と置き換えても式にはほとんど違いはないことからv o v i ≑ − g m 1 ⋅ r d s 1 ( s ⋅ C c − g m 2 ) ⋅ r d s 2 1 + s ⋅ { C 1 ⋅ C 2 + ( C 1 + C 2 ) ⋅ C c g m 2 ⋅ C c + g m 2 ⋅ r d s 2 ⋅ C c ⋅ r d s 1 } + s 2 ⋅ r d s 1 ⋅ r d s 2 ⋅ g m 2 ⋅ C c ⋅ { C 1 ⋅ C 2 + ( C 1 + C c ) ⋅ C c g m 2 ⋅ C c } \displaystyle \frac{v_{o}}{v_{i}}\doteqdot\frac{-g_{m1}\cdot r_{ds1}\left(s\cdot C_{c}-g_{m2}\right)\cdot r_{ds2}}{1+s\cdot\left\{\frac{C_{1}\cdot C_{2}+\left(C_{1}+C_{2}\right)\cdot C_{c}}{g_{m2}\cdot C_{c}}+g_{m2}\cdot r_{ds2}\cdot C_{c}\cdot r_{ds1}\right\}+s^{2}\cdot r_{ds1}\cdot r_{ds2}\cdot g_{m2}\cdot C_{c}\cdot\left\{\frac{C_{1}\cdot C_{2}+\left(C_{1}+C_{c}\right)\cdot C_{c}}{g_{m2}\cdot C_{c}}\right\}}
因数分解してv o v i ≑ g m 1 ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 ⋅ ( 1 − s ⋅ C c g m 2 ) [ 1 + s ⋅ { C 1 ⋅ C 2 + ( C 1 + C 2 ) ⋅ C c g m 2 ⋅ C c } ] ⋅ ( 1 + s ⋅ g m 2 ⋅ r d s 1 ⋅ r d s 2 ⋅ C c ) \displaystyle \frac{v_{o}}{v_{i}}\doteqdot\frac{g_{m1}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2}\cdot\left(1-s\cdot\frac{C_{c}}{g_{m2}}\right)}{\left[1+s\cdot\left\{\frac{C_{1}\cdot C_{2}+\left(C_{1}+C_{2}\right)\cdot C_{c}}{g_{m2}\cdot C_{c}}\right\}\right]\cdot\left(1+s\cdot g_{m2}\cdot r_{ds1}\cdot r_{ds2}\cdot C_{c}\right)}
ここで、A 0 ≡ g m 1 ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 A_{0}\equiv g_{m1}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2} ω p 1 ′ ≡ 1 g m 2 ⋅ r d s 1 ⋅ r d s 2 ⋅ C c \displaystyle \omega_{p1}^{\prime}\equiv\frac{1}{g_{m2}\cdot r_{ds1}\cdot r_{ds2}\cdot C_{c}} ω p 2 ′ ≡ g m 2 ⋅ C c C 1 ⋅ C 2 + ( C 1 + C 2 ) ⋅ C c \displaystyle \omega_{p2}^{\prime}\equiv\frac{g_{m2}\cdot C_{c}}{C_{1}\cdot C_{2}+\left(C_{1}+C_{2}\right)\cdot C_{c}} ω z ≡ g m 2 C c \displaystyle \omega_{z}\equiv\frac{g_{m2}}{C_{c}}
とおくと、
v o v i ≑ A 0 ⋅ ( 1 − s / ω z ) ( 1 + s / ω p 1 ′ ) ⋅ ( 1 + s / ω p ′ 2 ) \displaystyle \frac{v_{o}}{v_{i}}\doteqdot\frac{A_{0}\cdot\left(1-s/\omega_{z}\right)}{\left(1+s/\omega_{p1}^{\prime}\right)\cdot\left(1+s/\omega_{p}^{\prime}2\right)}
が得られます。
目次に戻る
電流制限抵抗がある場合
電流制限抵抗がある場合の小信号等価回路を Fig. A1-2 に示します。
Fig. A1-2
まず v a v_{a} g m 1 ⋅ v i + v a r d s 1 + s ⋅ C 1 ⋅ v a + s ⋅ C c 1 + s ⋅ C c ⋅ R c ⋅ ( v a − v o ) = 0 g_{m1}\displaystyle \cdot v_{i}+\frac{v_{a}}{r_{ds1}}+s\cdot C_{1}\cdot v_{a}+\frac{s\cdot C_{c}}{1+s\cdot C_{c}\cdot R_{c}}\cdot\left(v_{a}-v_{o}\right)=0
( 1 r d s 1 + s ⋅ C 1 + s ⋅ C c 1 + s ⋅ C c ⋅ R c ) ⋅ v a = s ⋅ C c 1 + s ⋅ C c ⋅ R c ⋅ v o − g m 1 ⋅ v i \displaystyle \left(\frac{1}{r_{ds1}}+s\cdot C_{1}+\frac{s\cdot C_{c}}{1+s\cdot C_{c}\cdot R_{c}}\right)\cdot v_{a}=\frac{s\cdot C_{c}}{1+s\cdot C_{c}\cdot R_{c}}\cdot v_{o}-g_{m1}\cdot v_{i}
{ 1 + s ⋅ C c ⋅ R c + s ⋅ C 1 ⋅ r d s 1 ( 1 + s ⋅ C c ⋅ R c ) + s ⋅ C c ⋅ r d s 1 } ⋅ v a \left\{1+s\cdot C_{c}\cdot R_{c}+s\cdot C_{1}\cdot r_{ds1}\left(1+s\cdot C_{c}\cdot R_{c}\right)+s\cdot C_{c}\cdot r_{ds1}\right\}\cdot v_{a} = s ⋅ C c ⋅ r d s 1 ⋅ v o − g m 1 ⋅ r d s 1 ⋅ ( 1 + s ⋅ C c ⋅ R c ) ⋅ v i =s\cdot C_{c}\cdot r_{ds1}\cdot v_{o}-g_{m1}\cdot r_{ds1}\cdot\left(1+s\cdot C_{c}\cdot R_{c}\right)\cdot v_{i}
v a = s ⋅ C c ⋅ r d s 1 ⋅ v a − g m 1 ⋅ r d s 1 ⋅ ( 1 + s ⋅ C c ⋅ R c ) ⋅ v i 1 + s ⋅ { C c ⋅ R c + ( C 1 + C c ) ⋅ r d s 1 } + s 2 ⋅ C c ⋅ r d s 1 ⋅ C 1 ⋅ R c v_{a}=\displaystyle \frac{s\cdot C_{c}\cdot r_{ds1}\cdot v_{a}-g_{m1}\cdot r_{ds1}\cdot\left(1+s\cdot C_{c}\cdot R_{c}\right)\cdot v_{i}}{1+s\cdot\left\{C_{c}\cdot R_{c}+\left(C_{1}+C_{c}\right)\cdot r_{ds1}\right\}+s^{2}\cdot C_{c}\cdot r_{ds1}\cdot C_{1}\cdot R_{c}}
ここで分母を f ( s ) f(s) v a = s ⋅ C c ⋅ r d s 1 ⋅ v a − g m 1 ⋅ r d s 1 ⋅ ( 1 + s ⋅ C c ⋅ R c ) ⋅ v i f ( s ) v_{a}=\displaystyle \frac{s\cdot C_{c}\cdot r_{ds1}\cdot v_{a}-g_{m1}\cdot r_{ds1}\cdot\left(1+s\cdot C_{c}\cdot R_{c}\right)\cdot v_{i}}{f(s)}
続いて v o v_{o} g m 1 ⋅ v i + v a r d s 1 + s ⋅ C 1 ⋅ v a + s ⋅ C c 1 + s ⋅ C c ⋅ R c ⋅ ( v a − v o ) = 0 g_{m1}\displaystyle \cdot v_{i}+\frac{v_{a}}{r_{ds1}}+s\cdot C_{1}\cdot v_{a}+\frac{s\cdot C_{c}}{1+s\cdot C_{c}\cdot R_{c}}\cdot\left(v_{a}-v_{o}\right)=0
( g m 2 − s ⋅ C c 1 + s ⋅ C c ⋅ R c ) ⋅ v a = ( s ⋅ C c 1 + s ⋅ C c ⋅ R c + 1 r d s 2 + s ⋅ C 2 ) ⋅ v o \left(g_{m2}-\frac{s\cdot C_{c}}{1+s\cdot C_{c}\cdot R_{c}}\right)\cdot v_{a}=\left(\frac{s\cdot C_{c}}{1+s\cdot C_{c}\cdot R_{c}}+\frac{1}{r_{ds2}}+s\cdot C_{2}\right)\cdot v_{o}
{ g m 2 ⋅ r d s 2 ⋅ ( 1 + s ⋅ C c ⋅ R c ) − s ⋅ C c ⋅ r d s 2 } ⋅ v a \left\{g_{m2}\cdot r_{ds2}\cdot\left(1+s\cdot C_{c}\cdot R_{c}\right)-s\cdot C_{c}\cdot r_{ds2}\right\}\cdot v_{a} = − { s ⋅ C c ⋅ r d s 2 + ( 1 + s ⋅ C c ⋅ R c ) + s ⋅ C 2 ⋅ r d s 2 ⋅ ( 1 + s ⋅ C c ⋅ R c ) } ⋅ v o =-\left\{s\cdot C_{c}\cdot r_{ds2}+\left(1+s\cdot C_{c}\cdot R_{c}\right)+s\cdot C_{2}\cdot r_{ds2}\cdot \left(1+s\cdot C_{c}\cdot R_{c}\right)\right\}\cdot v_{o}
v o = − g m 2 ⋅ r d s 2 ⋅ ( 1 + s ⋅ C c ⋅ R c ) − s ⋅ C c ⋅ r d s 2 1 + s ⋅ { C c ⋅ R c + ( C 2 + C c ) ⋅ r d s 2 } + s 2 ⋅ C c ⋅ r d s 2 ⋅ C 2 ⋅ R c ⋅ v a v_{o}=\displaystyle \frac{-g_{m2}\cdot r_{ds2}\cdot\left(1+s\cdot C_{c}\cdot R_{c}\right)-s\cdot C_{c}\cdot r_{ds2}}{1+s\cdot\left\{C_{c}\cdot R_{c}+\left(C_{2}+C_{c}\right)\cdot r_{ds2}\right\}+s^{2}\cdot C_{c}\cdot r_{ds2}\cdot C_{2}\cdot R_{c}}\cdot v_{a}
ここで分母を g ( s ) g(s) v o = − g m 2 ⋅ r d s 2 ⋅ ( 1 + s ⋅ C c ⋅ R c ) − s ⋅ C c ⋅ r d s 2 g ( s ) ⋅ v a v_{o}=\displaystyle \frac{-g_{m2}\cdot r_{ds2}\cdot\left(1+s\cdot C_{c}\cdot R_{c}\right)-s\cdot C_{c}\cdot r_{ds2}}{g(s)}\cdot v_{a}
③を④に代入してv o = − g m 2 ⋅ r d s 2 ⋅ { 1 + s ⋅ C c ⋅ ( R c − 1 g m 2 ) } f ( s ) ⋅ s ⋅ C c ⋅ r d s 1 ⋅ v o − g m 1 ⋅ r d s 1 ⋅ ( 1 + s ⋅ C c ⋅ R c ) ⋅ v i g ( s ) v_{o}=\displaystyle \frac{-g_{m2}\cdot r_{ds2}\cdot\left\{1+s\cdot C_{c}\cdot\left(R_{c}-\frac{1}{g_{m2}}\right)\right\}}{f(s)}\cdot\frac{s\cdot C_{c}\cdot r_{ds1}\cdot v_{o}-g_{m1}\cdot r_{ds1}\cdot\left(1+s\cdot C_{c}\cdot R_{c}\right)\cdot v_{i}}{g(s)}
f ( s ) ⋅ g ( s ) ⋅ v o = − g m 2 ⋅ r d s 2 ⋅ { 1 + s ⋅ C c ⋅ ( R c − 1 g m 2 ) } { s ⋅ C c ⋅ r d s 1 ⋅ v o − g m 1 ⋅ r d s 1 ⋅ ( 1 + s ⋅ C c ⋅ R c ) ⋅ v i } f(s)\cdot g(s)\cdot v_{o}=-g_{m2}\cdot r_{ds2}\cdot\left\{1+s\cdot C_{c}\cdot\left(R_{c}-\frac{1}{g_{m2}}\right)\right\}\left\{s\cdot C_{c}\cdot r_{ds1}\cdot v_{o}-g_{m1}\cdot r_{ds1}\cdot\left(1+s\cdot C_{c}\cdot R_{c}\right)\cdot v_{i}\right\}
[ f ( s ) ⋅ g ( s ) + g m 2 ⋅ r d s 2 ⋅ { 1 + s ⋅ C c ⋅ ( R c − 1 g m 2 ) } s ⋅ C c ⋅ r d s 1 ] ⋅ v o \left[f(s)\cdot g(s)+g_{m2}\cdot r_{ds2}\cdot\left\{1+s\cdot C_{c}\cdot\left(R_{c}-\frac{1}{g_{m2}}\right)\right\}s\cdot C_{c}\cdot r_{ds1}\right]\cdot v_{o} = g m 2 ⋅ r d s 2 ⋅ { 1 + s ⋅ C c ⋅ ( R c − 1 g m 2 ) } ⋅ g m 1 ⋅ r d s 1 ⋅ ( 1 + s ⋅ C c ⋅ R c ) ⋅ v i =g_{m2}\cdot r_{ds2}\cdot\left\{1+s\cdot C_{c}\cdot\left(R_{c}-\frac{1}{g_{m2}}\right)\right\}\cdot g_{m1}\cdot r_{ds1}\cdot\left(1+s\cdot C_{c}\cdot R_{c}\right)\cdot v_{i}
[ ] 内を h ( s ) h(s) v o v i = g m 1 ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 ⋅ { 1 + s ⋅ C c ⋅ ( R c − 1 g m 2 ) } ⋅ ( 1 + s ⋅ C c ⋅ R c ) h ( s ) \displaystyle \frac{v_{o}}{v_{i}}=\frac{g_{m1}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2}\cdot\left\{1+s\cdot C_{c}\cdot\left(R_{c}-\frac{1}{g_{m2}}\right)\right\}\cdot\left(1+s\cdot C_{c}\cdot R_{c}\right)}{h(s)}
ここで h ( s ) h(s) h ( s ) = f ( s ) ⋅ g ( s ) + g m 2 ⋅ r d s 2 ⋅ { 1 + s ⋅ C c ⋅ ( R c − 1 g m 2 ) } s ⋅ C c ⋅ r d s 1 h(s)=f(s)\cdot g(s)+g_{m2}\cdot r_{ds2}\cdot\left\{1+s\cdot C_{c}\cdot\left(R_{c}-\frac{1}{g_{m2}}\right)\right\}s\cdot C_{c}\cdot r_{ds1} = f ( s ) ⋅ g ( s ) + s ⋅ C c ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 + s 2 ⋅ C c 2 ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 ( R c − 1 g m 2 ) =f(s)\cdot g(s)+s\cdot C_{c}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2}+s^{2}\cdot C_{c}^{2}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2}\left(R_{c}-\frac{1}{g_{m2}}\right) = f ( s ) ⋅ g ( s ) + s ⋅ C c ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 + s 2 ⋅ C c 2 ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 ⋅ R c − s 2 ⋅ C c 2 ⋅ r d s 1 ⋅ r d s 2 =f(s)\cdot g(s)+s\cdot C_{c}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2}+s^{2}\cdot C_{c}^{2}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2}\cdot R_{c}-s^{2}\cdot C_{c}^{2}\cdot r_{ds1}\cdot r_{ds2}
ここで、f ( s ) f(s) f ( s ) = 1 + s ⋅ { C c ⋅ r d s 1 + C c ⋅ R c + C 1 ⋅ r d s 1 } + s 2 ⋅ C c ⋅ r d s 1 ⋅ C 1 ⋅ R c f(s)=1+s\cdot\left\{C_{c}\cdot r_{ds1}+C_{c}\cdot R_{c}+C_{1}\cdot r_{ds1}\right\}+s^{2}\cdot C_{c}\cdot r_{ds1}\cdot C_{1}\cdot R_{c}
で、C c ⋅ r d s 1 ≫ C c ⋅ R c + C 1 ⋅ r d s 1 C_{c}\cdot r_{ds1}\gg C_{c}\cdot R_{c}+C_{1}\cdot r_{ds1} C c ⋅ r d s 1 ≫ C 1 ⋅ R c C_{c}\cdot r_{ds1}\gg C_{1}\cdot R_{c} C c ⋅ R c + C 1 ⋅ r d s 1 C_{c}\cdot R_{c}+C_{1}\cdot r_{ds1} C 1 ⋅ R c C_{1}\cdot R_{c} f ( s ) ≑ 1 + s ⋅ ( C 1 ⋅ R c + C c ⋅ r d s 1 ) + s 2 ⋅ C c ⋅ r d s 1 ⋅ C 1 ⋅ R c = ( 1 + s ⋅ C c ⋅ r d s 1 ) ⋅ ( 1 + s ⋅ C 1 ⋅ R c ) f(s)\doteqdot 1+s\cdot\left(C_{1}\cdot R_{c}+C_{c}\cdot r_{ds1}\right)+s^{2}\cdot C_{c}\cdot r_{ds1}\cdot C_{1}\cdot R_{c}=\left(1+s\cdot C_{c}\cdot r_{ds1}\right)\cdot\left(1+s\cdot C_{1}\cdot R_{c}\right)
同様に g ( s ) g(s) g ( s ) ≑ ( 1 + s ⋅ C c ⋅ r d s 2 ) ⋅ ( 1 + s ⋅ C 2 ⋅ R c ) g(s)\doteqdot\left(1+s\cdot C_{c}\cdot r_{ds2}\right)\cdot\left(1+s\cdot C_{2}\cdot R_{c}\right)
ここで、⑦, ⑧ から f ( s ) ⋅ g ( s ) f(s)\cdot g(s) f ( s ) ⋅ g ( s ) = 1 + s 2 ⋅ C c 2 ⋅ r d s 1 ⋅ r d s 2 + ⋯ f(s)\cdot g(s)=1+s^{2}\cdot C_{c}^{2}\cdot r_{ds1}\cdot r_{ds2}+\cdots
この第2項は、⑥式の第4項と打ち消し合うため、h ( s ) h(s) h ( s ) = 1 + s ⋅ { ( C c ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 ) + ( C c ⋅ R c ) } ( C c ⋅ r d s 1 g m 2 ⋅ r d s 2 + C c ⋅ R c ) + s 2 ⋅ { ( C c ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 ) ⋅ ( C c ⋅ R c ) } h(s)=1+s\cdot\left\{\left(C_{c}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2}\right)+\left(C_{c}\cdot R_{c}\right)\right\}\left(C_{c}\cdot r_{ds1}g_{m2}\cdot r_{ds2}+C_{c}\cdot R_{c}\right)+s^{2}\cdot\left\{\left(C_{c}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2}\right)\cdot\left(C_{c}\cdot R_{c}\right)\right\} = ( 1 + s ⋅ C c ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 ) ( 1 + s ⋅ C c ⋅ R c ) =\left(1+s\cdot C_{c}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2}\right)\left(1+s\cdot C_{c}\cdot R_{c}\right)
⑨を⑤に代入するとv o v i = g m 1 ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 ⋅ { 1 + s ⋅ C c ⋅ ( R c − 1 g m 2 ) } 1 + s ⋅ C c ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 \displaystyle \frac{v_{o}}{v_{i}}=\displaystyle \frac{g_{m1}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2}\cdot\left\{1+s\cdot C_{c}\cdot\left(R_{c}-\frac{1}{g_{m2}}\right)\right\}}{1+s\cdot C_{c}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2}}
が得られます。
A 0 = g m 1 ・ r d s 1 ⋅ g m 2 ⋅ r d s 2 A_{0}=g_{m1}\text{・}r_{ds1}\cdot g_{m2}\cdot r_{ds2} ω p 1 ′ = 1 C c ⋅ r d s 1 ⋅ g m 2 ⋅ r d s 2 \displaystyle \omega_{p1}^{\prime}=\frac{1}{C_{c}\cdot r_{ds1}\cdot g_{m2}\cdot r_{ds2}} ω z ′ = 1 C c ⋅ ( R c − 1 g m 2 ) \displaystyle \omega_{z}^{\prime}=\frac{1}{C_{c}\cdot\left(R_{c}-\frac{1}{g_{m2}}\right)}
v o v i = A 0 ( 1 + s / ω z ′ ) 1 + s / ω p 1 ′ \displaystyle \frac{v_{o}}{v_{i}}=\displaystyle \frac{A_{0}\left(1+s/\omega_{z}^{\prime}\right)}{1+s/\omega_{p1}^{\prime}}
と、制限抵抗がない場合と比べて Open Loop Gain は同じで、同じ角周波数に Pole が現れて、 Zero は R c R_c 1 g m 2 \frac{1}{g_{m2}}
ひとこと
ここでは計算を容易にするためにかなりラフな近似を行っているために、上記の伝達関数の式の分母には低周波の単一の Pole しか現れませんが、数値計算やシミュレーションなどを行うと、高周波に複数の Pole が見えてきます。
目次に戻る
コメント